
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пирометры частичного излучения 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [ 53 ] 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 в работе [19] приведена номограмма для расчета максимальной дальности действия сканирующих ИК приборов, в основу которой положена следующая расчетная формула: макс - Для примера на рнс 6.11 показана методика расчета при следующих исходных данных: Dflff, = 5; ? = 10; = 1 с; Y = 1 ср; t = Ю * с; = т„ = -0,7; CWn= 10; /хср = 200 Вт/ср; F p= 10- Вт. Так как все спектральные величины даны средшши значениями, то JlI bou 200.0,72 , ,10, = 10-9 = Бт/ср, Пор пор На номограмме проводим линию между точками D/f = 5 и С^обз^п - 0-; на шкале а получаем вспомогательную точку с, которую соединяем прямой линией с точкой Ь, соответствующей интегралу Fp/(IyXi)dk= 10. В точке пересечения этой прямой со шкалой Lj,. находим L = 26 мор. миль (48 км). 4. построители местной вертикали Предназначены для определения направления линии, соединяющей центр летательного аппарата (ЛА) с центром Земли и называемой местной вертикалью. Ориентация относительно этой линии позволяет построить орбитальную систему координат, стабилизировать ЛА по крену и тангажу и решить ряд других задач, связанных с их управлением. Принцип определения местной вертикали основан на измерении угла между направлением на край диска планеты и осями аппарата в различных точках горизонта. Для планет сферической формы местная вертикаль является биссектрисой угла между двумя противоположными точками визируемого горизонта (рис. 6.12). При изменении крена нли тангажа ось курса t/i связанной системы координат oxit/iZi ЛА отклоняется на угол рассогласования Afi, который определяется по формулам  АРк=(Р1=-Р1)/2; (6.5) pjjc. 6.12. К определению (6 6) направления местной вер- тикали где Apj, и APjj - углы рассогласования в плоскости тангажа и крена; pj, Pg, Pi Р2 - углы визирования горизонта в плоскости тангажа и крена соответственно. Методы определения угловой ориентации ЛА разделяют на активные и пассивные. В настоящее время наибольшее распространение получил пассивный метод определения ориентации ЛА с использованием оптико-электрон- ных приборов в связи с их высокой точностью, надежностью и автономностью работы при сравнительно малых габаритных размерах, массе и энергопотреблении. Рассогласование АВ определяется оптико-электронными построителями местной вертикали с помощью приемников излучения (ПИ), фиксирующих энергетический контраст между краем диска планеты и окружающим космическим прострайством. При одинаковой интенсивности излучения планеты по горизонту воспринимаемая приемником энергия является функцией только углов визирования; уравнения (6.5) и (6.6) приводятся в этом случае к виду где f (АВ) - лучистый поток, поступающий на вход приемника, Вт. Разность значений f (ДР) и Fq дает информацию о величине и направлении угла рассогласования ДВ, т. е. об отклонении оси курса или крена от линии местной вертикали. Построители местной вертикали, как датчики ориентации на планеты, подразделяют на две группы: работающие по собственному тепловому излучению планет и работающие по отраженному планетой солнечному излучению. Достоинством датчиков первой группы являются: более простая схема обработки сигналоввследствие того, что планеты в инфракрасном диапазоне излучают по всему лимбу (отраженное излучение планет изменяется в зависимости от фазы); возможность использования датчиков днем и ночью. К достоинствам датчиков отраженного света относят: сравнительную дешевизну и простоту конструкции; возможность использования мозаичных приемников видимого диапазона, которые имеют меньшую постоянную времени, устойчивы к изменению температуры, обеспечивают соотношение сигнал/шум порядка 5000 против 30-100 для приемников инфракрасного диапазона. Независимо от принципа действия датчика основным источником ошибок при определении местной вертикали является несферичность планеты. Погрешность прибора в определении направления на центр планеты в меридиональной плоскости определяется выражением [35] - где е-эксцентриситет сфероида;. 7? - экваториальный радиус планеты; р - модуль радиуса-вектора объекта; ij) - широта проекции КЛА на поверхность планеты. При расчетах прибора используют осредненную кривую спектрального распределения интенсивности излучения. Принимаемый прибором лучистый поток определяется соотношением [35] 27С а F (е) = T]Sg I dij) f В (е + sin е sin ijj) sin e cos e d&, 0 6 где a - половина угла поля зрения прибора; е - угол падения излучения на чувствительную площадку приемника излучения; S - nDJi - площадь входного зрачка прибора; ц - коэффициент использования прибором лучистого потока. i, Принципиальная схема построителя местности вертикали определяется выбранным спектральным диапазоном и способом индикации направлишя падающего излучения. По способу индикации направления построители делят на статические и сканирующие. Статические построители выполняют по схеме сравнения освещенности противоположных краев диска планеты или по схемам с ооращенным изоораженнем. Характерной особенностью этил построителей является отсутствие подвижных частей и использование для обработки сигнала рассогласования амплитудного анализатора. Наиболее простым примером статического построителя является четырех-канальный прибор, у которого поля зрения расположены попарно в двух взаимно перпендикулярных плоскостях [39]. Оптические оси каналов отклонены от ориентируемой оси космического аппарата на один и тот же угол. Значение угла зависит от высоты орбиты и выбирается так, чтобы оптические оси каналов совпадали с касательными к земной поверхности. Угол пол зрения каждого прибора выби- рают из двух условий: 1) на приемник излучения должны одновременно проектироваться Рис. 6.13. Принцип построения местной вертикали с использованием четырехканального не-сканирующего устройства: с - точная ориентация по вертикали; б - ось КЛА отклонена от вертикали; /, 2, 3, 4 - поля зрения Лш зрения йатшоб 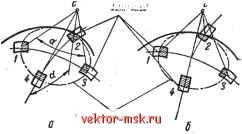 земная поверхность с окружающей атмосферой и космическое пространство 2) построитель вертикали должен работать при изменении высоты полета КЛА в заданных пределах. При помощи четырехканального прибора на борту ЛА непрерывно определяется положение горизонта Земли относительно осей каналов. Прием-. ники излучения каждой пары каналов включены на вход усилителей навстречу друг другу (рис. 6.13). Одна пара приемников (каналы 1, 3) формирует сигнал рассогласования по тангажу, а вторая (каналы 2, 4) - по крену. Пр - такой -схеме выходные сигналы рассогласования пропорциональны углам отклонения оси-рысканья от направления местной вертикали^ по тангажу и по крену. Приборы, построенные по данному принципу, имеют линзовый германиевый объектив и германиевый фильтр; рабочий диапазон длин волн 14-15 мкм; точность определения вертикали 5,22 10 ? рад. Достоинства построителя - отсутствие подвижных частей, малые-масса (3 кг) и габаритные размеры (объем-2 дм); небольшая потребляемая мощность (менее 6 Вт). Недостатки - малый диапазон изменения высоты полета ЛА (от 80 до 1600 км);, обеспечение работы только при полете ЛА по орбитам, близким к круговым. Сканирующие построители осуществляют просмотр пространства, который производится, механическими или электронными устройствами. Принцип действия построителей со сканированием горизонта планеты основан на перемещении поля зрения оптической ситемы ПИ в двух взаимно перпендикулярных плоскостях. Сигналы, снимаемые с приемников, соответствуют' мощности инфракрасного излучения планеты. Колебательное или вращатель-ноедвижение Мгновенного поля зрения оптической системы обеспечивает линейное сканирование горизонта планеты. На рис. 6.14 показан построитель с колеблющимися зеркалами. Колебательное устройство приводит в движение две пары зеркал в плоскости 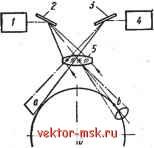 Рис. 6.14. Схема построителя с колеблющимися зеркалами: 7, 4- приемники излучения; 2, 3 - зеркала; 5 - объектив |















