
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пирометры частичного излучения 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 [ 47 ] 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 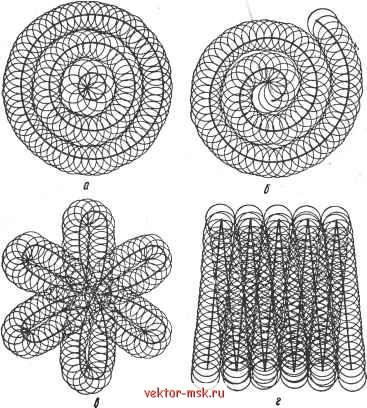 Рис. 5.73. Возможные формы разверток следящего координатора фирмы Мартин с гироскопическим приводом: а - круговая; б - спиральная; в - розеткообразная; г - треугольная которой смовтированы: первичное сферическое зеркало 8, вторичное плоское зеркало 1, прикрытое блендой 2, коррегирующая линза 3, диафрагма 4 и модулирующий диск 5. Вторичное зеркало и бленда укреплены на втулке, закрепленной в линзе 3. В трубе оптического узла установлен кар- * данный узел 11 с приемником излучения 7. На корпусе приемника смонтированы главные шариковые подшипники ротора гироскопа. Рис. 5.74. Конструкция следящего координатора фирмы Мартин : 1 - сосуд Дьюара; 2 - крепежный диск; 3 - первичное зеркало; 4 - вторичное аеркало; 5 - входное окно; 6 - приемник излучения; 7 - ось вращения; 8 - оптический фильтр; 9 - предусилитель; О - контактные кольца; -усилитель 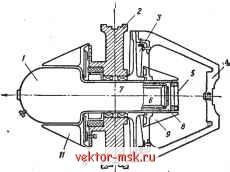 основной массой которого является постоянный магнит 10 с явно выраженными полюсами, укрепленный за первичным зеркалом. Вращение ротора гироскопа обеспечивается обмотками 9, размещенными в цилиндрическом корпусе координатора. Там же смонтированы обмотки коррекции и обмотки, с которых снимаются опорные напряжения. В режиме автоматического слежения за теплоизлучающий объектом выходные сигналы усилителя фототока поступают на обмотку коррекции. Возникающий магнитный поток, взаимодействуя с магнитным потоком постоянного магнита, вызывает прецессию гироскопа в направлении уменьшения угла рассогласования. Структурная схема системы автоматического слежения за объектом, использующая гироскопический привод, имеет две перекрестные связи между каналами. Если угол фазирования Ф мал, а < /*, перекрестными свя-8ями можно пренебречь. В этом случае каналы становятся автономными, и движение оптической оси координатора.при автоматическом слежении складывается из двух независимых движений - в продольной и поперечной плоскостях. При 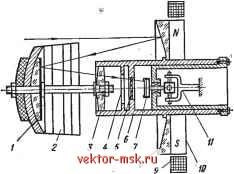 Рис. 5.75. Констругкция следящего координатора с гироскопическим приводом и вращающимся зеркалом: / - вторичное зеркало? 2 - бленда; 3 - коррегирующая линза; 4 - диафрагма; 5 - модулирующий диск; 6 - полая труба; / - приемник излучения; 8 - первичное зеркало; 9 - обмотки; 10 - постоянный магнит; 11 - карданный узел том выходное напряжение координатора, подаваемое в датчик моментов, с точностью до ошибок переходных процессов пропорционально угловой скорости линии дальности. Установив на осях вращения рамок карданного узла движки потенцио-метрических датчиков, можно при автоматическом слежении за подвижным объектом определить его угловые координаты относительно платформы, на которой закреплен гироскоп. В этом случае корпуса датчиков должны быть жестко связаны с, платформой. Одногироскопный следящий привод применяют в тех случаях, когда оптико-механический узел координатора небольшой массы и габаритных размеров или может быть конструктивно выполнен как часть ротора гироскопа. При сочленении гироскопического привода с массивным оптико-механическим узлом, изменяющим положение в пространстве оптической оси координатора, используют гиростабилизированные платформы. В противном случае необходимо применять гироскоп с большим кинетическим моментом для того, чтобы избежать влияния остаточной несбалансированности ротора и проявления нутации, вызванной увеличением экваториального момента инерции гироскопа. Увеличение же кинетического момента илечет за собой необходимость применения коррекционных датчиков с большим моментом вращения. Схема двухгироскопного привода изображена на рис. 5.76. Он состоит из двух гироскопов Г1 и Г2, внешние рамки которых жестко связаны между собой и образуют кожух, являющийся внутренней рамкой платформы. Поворот платформы относительно осей оук и ozk осуществляют при помощи коррекционных датчиков моментов Д1 и Д2, связанных с внутренними рамками /j - экваториальный момент инерции гироскопа; / - момент инерции ро- гироскопов Г1 и Г2. В обмотки датчиков моментов подают сигналы с выхода координатора цели, в результате чего платформа \начинает прецессировать; тяги Ту и Т^, связанные соответственно с внешней н\внутренней рамками ги-роплатформы, вызывают поворот оптического узла координатора. Систему фазируют так, чтобы при прецессионном движении платформы устранялось рассогласование между оптической осью координатора и направлением на объект. Рассмотрим поведение платформы под действием момента М^, создаваемого коррекционным датчиком Д2.. Предположим, что вектор и вектор кинетического момента гироскопа Г2 направлены так, как Показано на рис. 5.76. Возникший гироскопический момент стремится совместить по кратчайшему рас- 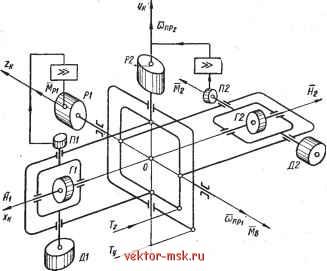 Рис. 5.76. Схема двухгироскопного привода стоянию вектор с вектором М^, т. е. внутренняя рамка платформы будет поворачиваться относительно оси оу с угловой скоростью С0пр2> перемещая тягу Тг- Аналогично, под действием момента, создаваемого коррекционным датчиком Д1, внешняя рамка платформы начнет прецессировать относительно оси ог с угловой скоростью copj, вызывая перемещение тяги Т^. Для компенсации внешних момен,ов предусмотрена система разгрузки, куда входят потенциометрические датчики П1 и П2, усилители сигналов, снимаемых с этих датчиков, и разгрузочные датчики Р1 и Р2. - Рассмотрим поведение платформы под действием внешнего момента М^, приложенного к внешней рамке. Предположим, что вектор Мъ направлен так, как показано на рис. 5.76. Под действием этого момента гироскоп Г1 начнет прецессировать, стремясь совместить вектор кинетического момента с вектором Мв. При повороте внутренней рамки гироскопа Г1 относительно платформы с потенциометрического датчика П1 снимается напряжение, которое после усиления подается в разгрузочный датчик моментов Р1. Возникающий при этом момент Afpj относительно оси ог направлен противоположно внешнему моменту и компенсирует его влияние. Аналогично ведет себя платформа при действии внешнего момента относительно оси оу с той разницей, что в этом |















