
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пирометры частичного излучения 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 [ 46 ] 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 Коэффициент Хф определяют из графиков на рис. 5.70, величину - по формуле f ф = -j-е^ТфО cos az Лм. ф/ (5.20) . При выводе формулы (5.20) предполагалось, что z (ЯхА^ ф) < z (XJK ф), так как.температура фона мала, а ф - велика. Кроме того, было сделано допущение о том, что величины а и L одинаковы для всех участков поверхности фона. Это допущение оправдывается только при малых углах поля зрения оптической системы координатора. Наиболее сложным случаем расчета максимальной дальности действия является такой, когда наблюдаемый объект расположен на неравномерном теплоизлучающем фоне. При последовательном просмотре такого фона в поле зрения прибора попадают участки с различной лучистостью, и поток, воспринимаемый приемником излучения от фона, можно представить как сумму двух составляющих: постоянной f ф и переменной Af ф. Первая составляю- 10 15 FfW\BT/cM Рис. 5.70. График зависимости коэффициента Хф от величины лучистого потока fф, воспринимаемого от фона охлаждаемым (/) и неохлаждае-мым (2) приемниками щая обусловливает ухудшение чувствительности приемника излучения, вторая участвует в образовании напряжения шумов, которое превьипает напряжение собственных шумов, создаваемых приемником и электронной схемой усиления рабочего сигнала. Для уменьшения влияния переменной составляющей потока уменьшают чувствительность прибора, хотя это ведет к уменьшению его дальности действия. Второй способ заключается в уменьшении мгновенного угла зрения прибора за счет площади чувствительной площадки приемника излучения. 7. СЛЕДЯЩИЕ КООРДИНАТОРЫ Предназначены для автоматического сопровождения движущегося объекта по направлению и применяются в тех случаях, когда необходимо материализовать в пространстве положение линии визирования на движущийся объект или определить угловую скорость линии визирования. В состав следящего координатора входят собственно координатор, выходные напряжения которого пропорциональны угловым координатам объекта, перемещающегося относительно пункта наблюдения, и следящий привод, перемещающий оптическую систему координатора так, что в каждый момент времени оптическая ось направлена на объект. Следящие координаторы состоят из двух идентичных по структурной-схеме и конструктивному выполнению каналов, каждый из которых представляет собой замкнутую систему автоматического управления. В зависимости от типа используемого следящего привода различают следящие координаторы с гироскопическим, электромеханическим и электрогидравлическим приводами, из которых первые применяют наиболее часто. К следящим приводам координаторов предъявляют жесткие требования, основными из которых являются: высокая точность даже при небольших дальностях до объекта, когда угловая скорость линии визирования велика; измерение угловой скорости линии визирования простыми в техническом от- ношении средствами; возможность развязки в тех случаях, когда устройство сопровождения устанавливают на движущейся платформе. Наиболее полно этим требованиям удовлетворяет гироскопический привод. В следящем координаторе с гироскопическим приводом (рис. 5.71) оптическая система координатора связана с внутренней рамкой трехстепенного гироскопа, имеющего два коррекпионных датчика моментов. Выходные сигналы координатора поступают в усилители мощности и после усиления подаются в датчики моментов. Напряжение рассогласования U, пропорциональное составляющей ф^ угла рассогласования в поперечной плоскости, подается на датчик моментов по оси г^, а напряжение Uy, пропорциональное составляю- 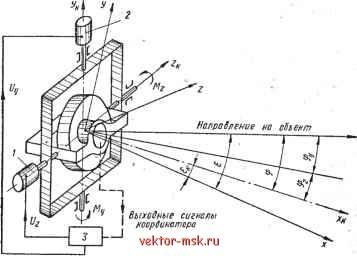 Рис. 5.71. Схема следящего координатора с гироскопическим приводом; охуг - неподвижная система координат; о^к^к^к ~ система координат, свя-ванная с координатором; 1, 2 - датчики моментов; S - усилитель мощности щей угла рассогласования в продольной плоскости - на датчик моментов по оси у^. При отклонении оси координатора от направления на объект коррек-ционные датчики, связанные с осями вращения рамок, создают вращающие моменты, под действием которых гироскоп прецесснрует в направлении совмещения оси координатора с объектом. Прецессия прекращается, когда ось координатора совмещается с линией дальности (направлена на объект), и . напряжения U и U становятся равными нулю. При вращении линии дальности с постоянной угловой скоростью возникает установившийся процесс слежения, при котором моменты коррекцион-ных датчиков пропорциональны проекциям вектора угловой скорости линии дальности на соответствующие осн. Измеряя величину моментов коррекцион-ных датчиков (например, посиле тока в обмотках), можно определить проекции вектора угловой скорости линии дальности на два взаимно перпендикулярных направления. По такому принципу действует следящий координатор фирмы Мартин (США), кинематическая схема оптико-механического узла которого изображена на рис. 5.72. Зеркальный объектив, охлаждаемый приемник излучения и усилитель фототока выполнены в виде единого вращающегося узла, который одновременно является.ротором гироскопа. Зеркало 2 приводится во вращение электродвигателем 1 с частотой 10 с~. На горизонтальной и вертикальной осях вращения карданного узла расположены коррекционные датчики моментов 6 я4.Ъ качестве датчиков положения использованы сельсины 3 и 5. При массе менее 22 ,7 кг следящее устройство имеет диаметр входного зрачка 305 мм и угол поля обзора 340°. Для создания круговой развертки в-режиме поиска на датчики коррек-ционных моментов подают напряжения, сдвинутые по фазе на 90°. Спиральна? развертка создается изменением амплитуд напряжений при том же сдвиге фаз. В режиме автоматического слежения за объектом управляющие напря- жения на датчики моментов подают с выхода усилителя фототока координатора. Переключение из режима поиска в режим слежения осуществляют при помощи реле захвата объекта. Карданный подвес координатора и использование принципа прецессии позволяют при одной и той же конструкции получить различные типы разверток за счет изменения формы напряжений, подаваемых на датчики коррекционных моментов (рис. 5.73). Конструкция следящего координатора фирмы Мартин показана на рис. 5.74. Он содержит следующие основные узлы.  Рис. 5.72. Кинематическая схема следящего координатора фирмы Мартин (США): / - электродвигатель: 2 - зеркальный объектив; 3, 5 - датч1жи положения (сельсины); 4, 6 - датчики моментов Оптическая система. Фокусное расстояние 300 мм; угол поля зрения 12°; материал - сотовая пирокерамика на основе магния; покрытие алюминиевых поверхностей - моноокись кремния; общие потери 25%. Привод. Двигатель - синхронный индукционный с непосредственной передачей (600-400 Гц, 75-100 Вт); ротор - длинный полый вал диаметром 101,6 мм; подшипники - шариковые прецизионные. Щр иемники излучения. Тип - германий, легированный цинком; размеры - толщина 6 мм, площадь 1 мм; расположение приемников - линейное (24 элемента); эффективная мощность шума 10 * Вт; длинноволновая граница чувствительности до 40 мкм; частота модуляции 10- 20 Гц;, напряжение питания 28 В; охлаждение - жидким азотом и жидким гелием, помещенными в двойной сосуд Дьюара из нержавеющей стали. Усилители. Охлаждение - криогенное; моитаж - вращающийся, центрированный; подключение - непосредственное, на каждый приемник по одному предусилителю с последующим каналом усиления; исполнение - полностью на транзисторах. Каждый приемник излучения использует общую оптическую систему и обеспечивает мгновенное поле зрения 0,25°. При вращении с частотой 10 с~* приемная система перекрывает конус с углом 12° за О, 1 с. При такой скорости время облучения достаточно велико по сравнению с постоянной времени приемника и в то же время обеспечивает получение информации даже при быстром изменении обстановки. По данным фирмы, следящее устройство с таким приемником сможет обнаруживать и следить за объектом площадью 0,75 м2 при температуре нагрева 30° С и с коэффициентом излучения 0,5 на расстояниях, превышающих 50 км. Рассмотрим еще одну конструкцию следящего координатора с гироскопическим приводом. Особенностью его, также, как и в предыдущем случае, является то, что он конструктивно объединен с гироскопом. Оптико-механический узел координатора (рис. 5.75) выполнен в виде полой трубы 6, на |















