
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 6 7 8 [ 9 ] 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 Глава 1. Микросистемы определив магнитный поток в виде: г'{. . Р = Pй + Pd (1.54) Считая, что динамическая составляющая <С (Oi соотношение между индуцированным напряжением и динамической составляющей тока можно записать в виде (из уравнения (1.51)): did J V г did Щ dt do dt do (1.55) Диналлическая составляющая магнитной силы может быть оценена при домоищ следующего выражения: do bo о (1.56) Для изготовления миниатюрных электромагнитных приводов требуется наладить производство тонких магнитных пленок и токо-проводящих катушек. Хотя в этом направлении и ведутся активные работы, но говорить о широкомасштабном производстве таких устройств пока не приходится. Также здесь существует проблема, связанная с необходимостью защиты от магнитных полей соседних устройств. 1.4.6. Электродинамические преобразователи Электродинамические преобразователи - одни из самых распространенных типов электромеханических приводов. Основным компонентом таких преобразователей является токопроводящая подвижная катушка, аналогичная катушкам, используемым в громкоговорителях. Схематично такой привод показан на рис. 1.12, Когда через катушку протекает электрический ток, она отклоняется со скоростью V в направлении действия силы F. Для упрощения анализа будем рассматривать небольшой сегмент катушки, расположенный как показано на рис. 1.13. Считаем, что элемент длиной dl, по которому протекает электрический ток, характеризуется двумя физическими величинами: скоростью V и индукцией В. По закону Ленца электродвижущая сила определяется следующим выражением: de = (v X B)dl. (1.57) Внешний магнит кольцевой формы Полюсный наконечник в форме диска 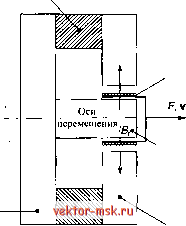 Катушка на каркасе Полюсный наконечник в форме цилиндра Полюсный наконечник в форме кольца * Рис. Схема электродинамического преобразователя. Репродукция из -i книги М. Rossi, 1988, Acoustic and Electroacoustic, Artech House, Norwood, MA, с разрешения Artech House, ©1988 Artech House Магнитная сила задается законом Лапласа: dFmag = idl X В. (1.58) Интегрфуя уравнение (1.58) по всей длине катушки, получим значение айектродвижущей силы на ее концах: (1.59) Рис. 1.13. Расположение сегмента катушки в поле. Репродукция из книги М. Rossi, 1988, Acoustic and Electroacoustic, ArtechjJlouse, Norwood, MA, с разрешения Artech House, ©1988 Artech House
По закону Ленца электродвижущая сила имеет противоположное направление току г. Аналогично, интегрируя уравнение (1.58), найдем значение для магнитной силы: тад = j dFmag = {В1)т, (1.60) где п - единичный положительный вектор, имеющий направление движения. Член (Bl) называется коэффициентом электродинамической связи. Для состояния равновесия в случае синусоидальных сигналов эти уравнения могут быть записаны в виде (Rossi, 1988): V = {Bl)v, Fmag = {Bl)I. (1.61) (1.62) Эти уравнения используются в эквивалентной схеме, показанной на рис. 1.14а. Здесь применен идеальный трансформатор, внешние источники представлены с электрической стороны в виде идеального источника напряжения с внутренним импедансом Z, а с механической стороны - идеальным источником силы с механическим сопротивлением Zm- Электрическое сопротивление и самоиндукция двигающейся катушки заключены в этих импедансах. Из этой эквивалентной схемы следует, что: -Ve + ZI = 0. (1.63) Подставив уравнение (1.61) в выражение (1.63), получим характеристическое уравнение системы: Ve = ZI+ {Bl)v. (1.64) Подобным образом можно вывести соотношение между электродвижущей силой и током, которое будет еще одним характеристическим уравнением этой системы (Rossi, 1988): Fe = - {Bl)I. (1.65) Эту эквивалентную схему можно упростить, как показано на рис. 1.146. Объединив уравнения (1.64) и (1.65), избавимся от необходимости использования четырехполюсной цепи: Ve = ZI + {Bl) (Ре + (Bl)!) Ym = iZ + Zem)I + Vp, (1.66) где Zem = {BlfYr, Vf = {Bl)YmFe = {Bl)Ve. (1.67) (1.68) Рис. 1.14. Эквивалентные схемы преобразователя. Репродукция из книги М. Rossi, 1988, Acoustic and Electroacoustic, Artech House, Norwood, MA, с разрешения Artech House, ©1988 Artech House 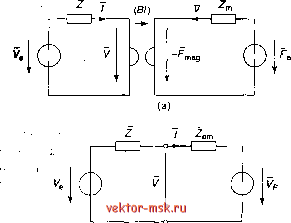 В уравнении (1.68) - скорость движения разомкнутой катушки (/ = 0), т.е. когда к ней приложена внешняя сила, Zm - полное кинетическое сопротивление, используемое для преобразования механической части схемы в электрическую цепь. Как бьио отмечено ранее, электродинамические преобразователи широко применяются в громкоговорителях. Однако из-за высоких требований, предъявляемых к катушке и магнитным полям, они не сильно распространены в микроэлектронике. Есть информация об изготовлении довольно миниатюрных электродинамических микродвигателей (7 мм X 15 мм X 0.4 мм) (Prank, 1998), резонансная частота которых определяется соотношением: . 1 (BJ7] (1.69) - плотность материала плотность тока, as - Де T]m - коэффициент нагрузки ротора, р проволоки, используемой для катушки, J -максимальное смещение ротора. Также как и в электродинамических преобразователях, здесь остро стоит проблема изготовления миниатюрных магнитов и то-копроводящих катушек. В этом случае катушка должна еще быть и Глава 1. Микросистемы подвижной. Поэтому для использования таких преобразователей в ВЧ микросистемах прежде всего надо решить эту технологическую задачу. 1.4.7. Электротермические преобразователи В электротермических преобразователях основным компонентом является биморфный элемент, который расширяется под действием тепла, подведенного к нему, вызывая тем самым требуемое механическое перемещение привода. По такой схеме возможно получение больших деформаций и значительной плотности энергии. Однако электротермические преобразователи имеют очень низкое быстродействие и поэтому являются практически бесполезными на интересующих нас частотах. Но ради полноты изложения кратко рассмотрим принцип их действия. В литературе приведено несколько типов таких преобразователей, которые основаны на двух видах электротермических процессов: обратимых и необратимых. IN Ф'н Ф'з VouT = sAfls Нагреватель  Электрическая энергия , , нагрева (v) Диафрагма/датчик температуры H(s) = TS+ 1 Преобразованный эяектрМчеекии сигнал (ДЦзит)/ Рис. 1.15. Принцип действия электротермического преобразователя. Репродукция из книги К.Н. Lee, H.J. Byun, Н.К. Lee, LJ. Bu, E. Yoon, 2000, Ап audio frequency filter application of micromachined thermally-isolated diaphragm structures*, 1 Annual International Conference on Micro Electro Mechanical Systems, MEMS 2000, IEEE, Washington, DC, 142-147, с разрешения I-EEE, © IEEE Ha рис. 1.15 (Lee et al, 2000) показана схема фильтра звуковых частот, в котором используется электротермический привод. Такое устройство состоит из термически изолированной тонкой диафрагмы, изготовленной методом травления с нижней стороны подложки и пары металлических резисторов: для нагревателя и датчика, реализованного методом литографии. Через нагревательный элемент, обладающий сопротивлением Rh, протекает ток /я- Выделяемое 1.4- Электромеханические преобразователи тепло регулируется входным напряжением Vm- Изменение сопротивления в цепи датчика, пропорциональное изменению температуры ДГ, приводит к соответствующему перепаду выходного напряжения MJout- Принцип действия таких фильтров очень прост. Изменение входного переменного напряжения на концах нагревателя приводит к изменению температуры на диафрагме. Сенсорный резистор фиксирует это изменение температуры и преобразует его в соответствующее выходное напряжение. При этом высокочастотные компоненты входного сигнала отфильтровываются, поскольку диафрагма не успевает их отрабатывать. Очевидно, что такой фильтр подходит только для низких звуковых частот (Lee et al, 2000). Рис. 1.16. Биморфный электротермический преобразователь. Репродукция из книги Q.A. Huang, N.K.S. Lee, 1999, ((Analysis and design of polysil-icon thermal flexure actuator*, Journal of Micromechanics and Microengineering 9: 64-70, с разрешения Institute of Physics изгибающаяся анкеры деталь горячее плечо холодное плечо  х = 2/+д х = 1+д X х+Ах {; поликремний - Щ воздух - SiOp В литературе приводятся и другие конфигурации микроприво-дов, основанных на электротермическом принципе (Huang, Lee, 1999, Rirthmuller, Benecke, 1988). В первом случае для получения требуемой деформации используется разность электрических сопротивлений двух плечей биморфной структуры: узкого и широкого (рис. 1.16 а, Huang, Lee, 1999). Эта разность сопротивлений приво- |
||||||||||||||||||||||||||||















