
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 6 [ 7 ] 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 Глава 1. Микросистемы В этих уравнениях di и с^г - пьезоэлектрические константы материала, относящиеся, соответственно, к прямому и обратному пьезоэффекту. Для случая же, когда в электромеханической системе присутствуют и напряжение, и сила, можно записать следующие соотношения: Q = dxF + CQV, X = d2V + CmF, (1.10) (1.11) где Со - свободная емкость, а Сщ - коэффициент упругости преобразователя. Коэффициент электромеханической связи является другой очень важной безразмерной величиной, характеризующей работу пьезоэлектрических преобразователей. Этот коэффициент равен отношению полезной механической работы к электрической энергии, накопленной в преобразователе (Нот et al, 1994). Коэффициент электромеханической связи зависит от вида материала, от типа механического воздействия и от поляризации электрического поля. Для линейных пьезоэлектрических материалов этот коэффициент задается соотношением: (1.12) где d - пьезоэлектрическая константа материала, S - упругость, as - диэлектрическая проницаемость материала. Для получения пленок из PZT используют стандартные тонкопленочные технологии, например, напыление и физическое или химическое вакуумное осаждение. Возможность применения тонких пленок, полученных при помощи этих методов, в датчиках и приводах существенно зависит от их качества и воспроизводимости. В отличие от объемных технологий при формировании тонких пленок очень важными являются свойства поверхностей, на которых они осаждаьртся (Muralt, 2000). В датчиках, в которых выходным сигналом является напряжение, могут использоваться тонкие пленки из A1N. Однако для приводов предпочтительнее применять тонкие пленки из PZT. По сравнению с другими электромеханическими системами пьезоэлектрические преобразователи работают с небольшими входными напряжениями, но при этом обычно имеют низкую эффективность электромеханического преобразования. 1.4- Электромеханические преобразователи 1,4.2. Электрострикционные преобразователи Механическая деформация материала под действием электрического поля называется электрострикцией. Этим свойством в разной степени обладают все материалы. Электрострикция объясняется наличием в любом материале поляризуемых атомов и молекул. Вследствие этого приложенное электрическое поле вызывает перераспределение зарядов внутри материала, что приводит к изменению длин и углов внутримолекулярных связей, а также к перемещению электронов. Все это является причиной механических деформаций материала. Напряженность электрического поля Е и электрическое смещение D внутри материала связаны следующим соотношением: D = £oE + P, (1.13) где So = 8.85 х 10 Ф/м - абсолютная диэлектрическая проницаемость, а Р - поляризация материала. Используя закон сохранения энергии, можно записать первый закон термодинамики для электрически деформируемых материалов в виде (Нот et al, 1994): dU = TijdSij + EkdDk + TdS. (1.14) В уравнении (1.14) U - внутренняя энергия единицы объема материала, Т - тензор напряжения, S - тензор бесконечно малых деформаций, Т - температура и S - энтропия на единицу объема. Функция Гиббса для эластичных материалов имеет вид: G = U- T,jS,j - \s,El - TS. (1.15) Подставив сюда выражение (1.13) и взяв производную, получим: dG dU - T.jdSij - S.jdTij - EkidDk - dPk) - TdS - SdT. (1.16) После подстановки в это уравнение выражения (1.14) и упрощения получаем следующее соотношение: dG = -SijdTij + ЕкРк - SdT. (1.17) Производную функции Гиббса можно также получить, используя правило цепей, расположенное на следующей странице. 52 Глава 1. Микросистемы Сравнивай уравнений (1.17) и (1.18), находим: (1.19) (1.20) (1.21) В книге (Нот et al, 1994) приведено выражение для функции Гиббса для эластичных материалов с учетом изотропных свойств диэлектрика: \P\\
(1.22) Первый член выражения описывает эластичные свойства материала, здесь соответствует упругости материала при постоянной поляризации. Второй член отвечает за электромеханическую связь, в нем матрица Q состоит из коэффициентов электростикции. Последний член относится к диэлектрическим свойствам материала. В этом вьфажении Pg является самопроизвольной поляризацией, а А; - константой материала, зависящей от его диэлектрических свойств. Поскольку считается, что материал является изотропным, величина поляризации определяется выражением: Р| = \/РкРк. (1.23) Коэффициенты материала в выражении (1.22), зависящие от температуры: s, Q, Ps и к, получаются из электрических и механических измерений. Подставив уравнение (1.22) в выражение (1.19), получим основное уравнение для электрострикционных материалов: Sij = Sfcifc QijmnPmPn- (1.24) 1.4- Электромеханические преобразователи Из этого уравнения видно, что деформация материала зависит от его упругости и величины поляризации, вызванной деформацией. Второй член этого выражения описывает эффект электрострикции. Видно, что вклад этой составляющей в величину суммарной деформации пропорционален квадрату поляризации материала. Это уравнение справедливо даже в случае большой напряженности электрического поля. Члены матрицы Q, являющиеся электрострикционны-ми коэффициентами, определяются экспериментально. Электрострикция очень похожа на пьезоэлектрический эффект. Характерной особенностью электрострикционных материалов является близость температуры фазового перехода к рабочим температурам, что объясняется их эластичными и гистерезисными свойствами. Однако для моделирования электромеханической связи при электрострикции требуется знание большого числа коэффициентов. Поляризация в пьезоэлектрических материалах является спонтанной, тогда как в электрострикционных материалах она вызывается электрическим полем. Свойства электрострикционных материалов сильнее зависят от температуры, а диапазон их рабочих температур уже по сравнению с пьезоэлектриками (Chen, Gururaja, 1997) Для электрострикционных преобразователей широко используются композиционные материалы на основе ниобата магния свинца [Pb(Mgo.33,Nbo.67)03(PMN)]. Свойства таких материалов интенсивно изучаются в последние годы (Pilgrim, 2000). Но на практике тонкопленочные преобразователи на основе этих материалов пока реализованы не были. Однако было показано, что тонкопленочные полимерные материалы с упругими графитовыми электродами обладают отличными электрострикционными свойствами (Pelrine, Когп-bluh, Joseph, 1998). Эти материалы способны на эффективный и быстрый отклик, обеспечивая высокий уровень сжатия/растяжения, хорошее давление привода (вплоть до 1.9 МПа) и высокую удельную плотность энергии. Но в данном случае электрострикцию нельзя объяснить перестроением диполей молекул (Heydt et al, 1998). В таких пленочных приводах, растяжение/сжатие происходит за счет действия внешних сил, вызванных электростатическим притяжением упругих графитовых электродов. Было показано, что такие приводы производят гораздо большее эффективное давление, чем традиционные электростатические приводы с воздушным зазором при одинаковом приложенном электрическом поле. 1.4.3. Магнитострикционные преобразователи Существуют ферромагнитные материалы, которые при попадании в магнитное поле меняют свои геометрические размеры. Этот эф- Глава 1. Микросистемы фект, известный как магнитострикция, является обратимым. Его также называют эффект Джоуля-Вийяра. В ненамагниченном состоянии домены в ферромагнитном материале ориентированы произвольным образом. Однако при попадании в магнитное поле они выстраиваются по направлению поля. Такое перестроение доменов приводит к возникновению сил взаимодействия между доменами, в результате чего происходит деформация материала. Существует и обратный эффект магнитострикции, когда приложенные к материалу механические силы вызывают его деформацию, которая приводит к изменению ориентации доменов, в результате чего уже на макроскопическом уровне появляется магнитная индукция (Rossi, 1988). Зависимость между удлинением элемента из ферромагнитного материала и индукцией магнитного поля является квадратичной и, следовательно, сильно нелинейной. 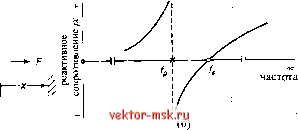 Г С, 4: 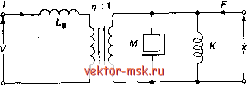 Рис. 1.8. Эквивалентная схема магнитострикционного преобразователя. Репродукция из книги R.A. Johnson, 1983, Mechanical Filters in Electronics, Wiley Interscience, New York, с разрешения Wiley, ©1983 Wiley Магнитострикционный преобразователь имеет в своем составе ферроэлектрический стержень, катушку и магнит (Johnson, 1983). При протекании через катушку электрического тока I происходит отклонение стержня в направлении действия силы F со скоростью х. Последовательность разработки эквивалентной схемы такого преобразователя схематично показана на рис. 1.8. График зависимости 1.4- Электромеханические преобразователи реактивного сопротивления от частоты, показанный на рис. 1.8 6, был получен при измерениях без нагрузки. Полюса и нули этой кривой соответствуют параллельному и последовательному резонансам в системе. По частотам нулей и полюсов можно определить значения параметров LC цепи, приведенной на рис. 1.8 в, которая является идеальной эквивалентной электрической схемой для преобразователя с рис. 1.8 а. Идеальной она считается потому, что в ней не учитываются потери в системе. На рис. 1.8 г приведена эквивалентная электромеханическая схема магнитострикционного преобразователя, соответствующая эквивалентной электрической схеме. В ее состав входят электрические и механические компоненты (масса М и пружина К), подсоединенные к электромеханическому трансформатору. Коэффициент передачи трансформатора задается электромеханическим коэффициентом связи, который определяется как отношение энергии, накопленной в механической цепи, к полной входной энергии. Электромеханическая связь в магнитострикционном преобразователе, показанном на рис. 1.8 а, определяется силой F, действующей на одном конце ферромагнитного стержня (второй конец закреплен), и током г, протекающим в катушке, которые связаны следующим соотношением (Rossi, 1998): (1.25) где 5д - модуль магнитострикционного напряжения, Е - модуль Юнга ферромагнитного материала, - полное магнитное сопротивление цепи, N - число витков катушки. Сила F называется магнитострикционной силой. Отношение в правой части этого уравнения является коэффициентом электромеханической связи. Тот же самый коэффициент связывает напряжение V на концах катушки и скорость перемещения свободного конца стержня: V=~-X. (1.26) Ферриты и металлические сплавы, такие как Пермаллой (45%Ni -t-+ 55%Fe), Алфер (13%А1 + 87%Fe) и Алкофер (12%А1 + 2%Со + + 86%Fe), являются самыми распространенными материалами, используемыми в магнитострикционных преобразователях. Некоторые из этих материалов могут быть осаждены в виде тонких пленок, НТО делает возможным их применение в микродатчиках и приводах. |















