
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 ханическая обработка и др., а также в объединении новых 3D микротехнологий с LIGA-процессом и микрообработкой кремния (Bertsch, Lorenz, Renaud, 1998, Takagi, Nakajima, 1994). Одним из таких комбинированных методов изготовления трехмерных микросистем является технология AMANDA, которая объединяет LIGA-процесс (или прецизионную обработку) и микрообработку кремния. Аббревиатура AMANDA появилась из немецких слов Abfor-mung, Oberflachenmikromechanik, Membranubertragung, что в переводе означает микрообработка, литье и перемещение диафрагмы. Эта технология позволила существенно расширить возможности построения 3D полимерных микросистем (Schomburg et al, 1998) Трехмерные микросистемы обычно состоят из множества слоев, часто изготовленных из разных структурных и функциональных материалов. Первые микросистемы, как правило, выполнялись из кремния и поликремния, но в настоящее время необходимо расширять круг используемых материалов, поскольку в современных приложениях к свойствам микроструктур предъявляются все новые и новые требования. Например, биологические микросистемы необходимо изготавливать из биосовместимых материалов. Оказывается, что для построения таких микросистем подходят многие полимеры (Ruprecht et al, 1998). В случае использования микросистемных устройств в суровых окружающих условиях (например, при высоких температурах) для их изготовления могут потребоваться огнеупорные материалы. Для таких применений лучше всего подходит керамика (Ayerdi et al, 1997, Mehregany, et al, 1998). Металлические материалы имеют хорошую репутацию в мире традиционного приборостроения, многие их свойства востребованы также и в области микротехнологий. Таким образом, в современных 3D технологиях стало возможным использование широкого круга структурных материалов, что привело к огромному прогрессу в области производства трехмерных микросистем (Cohen et al, 1999, Ikuta, Hirowatari,1993, Jiang, Sun, Zhang, 1999, Takagi, Nakajima, 1993, Taylor et al, 1994, Zhang, Jiang, Sun,1999). С другой стороны, большинство микродатчиков и приводов, используемых в микросистемах, изготавливаются из тонких пленок. Но если для построения микродатчиков подходят традиционные микр оэлек тронные технологии, то приводы по своей природе являются трехмерными структурами, и для их изготовления больше бы подошли другие методы (Guckel, 1998). На основе 3D структур возможно построение микроприводов, обладающих высокой выходной мощностью, что было невозможно ранее. Следовательно, применение со- временных материалов позволило реализовать новые типы микродатчиков и приводов, что привело к дальнейшему развитию микросистем. Часто для 3D микросистем бывает важным, чтобы используемые полимеры обладали пьезо- или ферроэлектрическими свойствами. Такие полимеры представляют собой комбинацию из традиционных полимеров, чувствительных к УФ излучению, и оптически прозрачных электропроводящих полимеров, к основной цепи которых присоединены боковые группы, состоящие из нанопьезо или ферро-электрических частиц. Целью разработки такой комбинации является создание основной цепи с функциональными группами, которые будут служить точками прикрепления металлических оксидов. На-ночастицы, такие как титанат цирконат свинца (PZT), PLZT и др., должны иметь активную поверхность или функциональные группы для возможности присоединения к полимерной цепи. Наночастицы при этом придают полимерам пьезоэлектрические свойства, а основная цепь обеспечивает механическую прочность и гибкость. 1.4. Электромеханические преобразователи Принцип действия механических фильтров и их микромеханических аналогов основан на преобразовании электрической энергии в механическую форму и наоборот, для чего применяются частотно-зависимые преобразователи. Этот раздел посвящен краткому рассмотрению основных типов электромеханических преобразователей. Здесь будут описаны принципы преобразования энергии в пьезоэлектрических, электрострикционных, магнитострикционных, электростатических, электромагнитных, электродинамических и электротермических преобразователях. Несмотря на то, что некоторые из рассматриваемых преобразователей не подходят для современных микросистем, понимание их принципа Д|5йстпия может покючь их реализации в будущем, например, в ВЧ фильтрах, что будет обсуждаться в пятой главе. Одним из самых важных этапов при разработке механических микросистем является построение эквивалентной электрической схемы по их аналитической модели. Иногда аналитическую модель системы сначала представляют в виде эквивалентной механической схемы, основанной на описании работы пружин и связанных с ними масс, и только потом, используя электромеханические аналогии, из нее получают эквивалентную электрическую схему. Такой под- Глава 1. Микросистемы ход может быть не является очень точным, но служит хорошим средством для понимания внутренних взаимосвязей, что всегда необходимо при разработке новых устройств. Электрические эквивалентные схемы дают возможность использования существующих программ оптимизации при проектировании электрических цепей фильтров. В таблице 1.2 приведен перечень часто используемых электромеханических аналогий (Johnson, 1983). Эти аналогии нужны разработчику при составлении эквивалентной электрической схемы для замены механических элементов на подобные электрические. Для примера рассмотрим разработку эквивалентной электрической схемы компонентов механической линии передач (Johnson, 1983). Переменными величинами в такой системе являются сила и скорость. Соотношение между входными и выходными переменными секции линии передач без учета потерь могут быть удобно записаны в матричной форме:
cos/Зж jZo sin (Зх Х2 F2 где Ау/У Ml VQMi (1.1) (1.2) (1.3) (1.4) В этих уравнениях j = \/, Жь Ж2 - скорости, Fi, F2 - силы, действующие на двух концах линии передач, Zq, /3 я Vp - характеристический импеданс, коэффициент передачи и фазовая скорость линии передач, А - площадь сечения механической линии передач, Е - модуль Юнга, ар - плотность материала. Величины С; и М; являются, соответственно, линейной упругостью и линейной массой (упругостью и массой на единицу длины) линии передач. Воспользовавшись таблицей 1.2, получим соотношение для эквивалентной электрической цепи, аналогичное (1-1): cos/За; 4- sinPx
(1.5) 1.4. Электромеханические преобразователи Таблица 1.2. Электромеханические аналогии
В соотношении (1.5) V и / являются напряжением и током в линии передач (нижний индекс указывает к выходу или входу они относятся). Остальные значения в матрице соответствуют эквивалентным электрическим параметрам: ., - Vr, - (1.6) (1.7) В уравнениях (1.6) и (1.7) L; и С; соответствуют линейным индуктивности и емкости (индуктивности и емкости на единицу длины), а е и - диэлектрической и магнитной проницаемости материала линии. При разработке эквивалентной электрической схемы иногда пользуются прямыми аналогами механических и электрических величин. Прямые аналоги получены из интегральных и дифференциальных уравнений, описывающих работу основных электрических и механических компонентов (Tilmans, 1996). Краткий перечень этих аналогов приведен в таблице 1.3.
1.4.1. Пьезоэлектрические преобразователи В ответ на механическое воздействие некоторые анизотропные кристаллические материалы вырабатывают электрический заряд. Это явление, открытое в 1880 году Пьером и Жаком Кюри, получившее название пьезоэлектричество, сейчас широко используется в ультразвуковых преобразователях. Титанаты цирконат свинца (PZT) являются наиболее распространенными керамическими материалами, применяемыми в пьезоэлектрических преобразователях. Кристаллы таких веществ содержат домены, ориентированные произвольным образом, если в процессе изготовления они не попадали в зону действия электрического поля. При механическом воздействии на такие материалы, их дипольный момент почти не изменяется. Однако если в процессе изготовления на стадии охлаждения эти материалы поместить в электрическое поле, внутренние домены выстроятся в направлении этого поля. Внешнее сжатие таких материалов приводит к деформации кристаллической решетки и изменению ориентации доменов, что вызывает перераспределение зарядов внутри самого материала. И, наоборот, при приложении к таким материалам электрического поля происходят изменения внутри доменов, что вызывает механическое сжатие/растяжение самого материала. Это явление получило название обратного пьезоэффекта. На рис. 1.7 показаны этапы разработки эквивалентной схемы для пьезоэлектрической пластины (Johnson, 1983). При приложении к пластине напряжения V, она начинает колебаться в направлении, показанном на рисунке (с силой F и скоростью х). На рис. 1.76 пока-  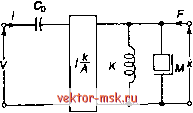 Рис. 1.7. Разработка эквивалентной схемы пьезоэлектрического преобразователя. Репродукция из книги R.A. Johnson, 1983, Mechanical Filters in Electronics, Wiley Interscience, New York, с разрешения Wiley, ©1983 Wiley Хотя пьезоэлектрический эффект в общем виде описывается квадратичной зависимостью, для малых деформаций будем считать его линейным. Тогда справедливы следующие соотношения: Q = diF, X = d2V. (1.8) (1.9) 3 - 10482 эана зависимость реактивного сопротивления от частоты (без учета высших гармоник колебаний и потерь). Аналогичную зависимость можно получить при помощи электрической цепи, показанной на рис. 1.7 в. Если эту схему дополнить гиратором с сопротивлением А и инвертором реактивного сопротивления jk, а также пружиной с коэффициентом жесткости К и грузом массой М, получим эквивалентную электромеханическую схему пьезоэлектрической пластины. Гиратор олицетворяет природу пьеэопреобразователя. Поскольку гиратор преобразует параллельный резонансный контур в последовательную цепь, потребовалось ввести в схему инвертор (Johnson, 1983). Последовательное включение в схему инвертора и гиратора позволило реализовать требуемую функцию jk/A. Для построения эквивалентных схем важным является также понимание принципа действия самих преобразователей. Далее будет дано краткое описание принципов действия наиболее распространенных преобразователей, используемых в электромеханических системах. Таблица 1.3. Прямые аналоги электрических и механических компонентов |















