
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 зом, чтобы их выходные токи складывались. По такому же принципу можно реализовать и режекторный фильтр, для этого выводы включаются так, чтобы токи складьтались в противоположных фазах. Здесь предполагается, что массой соединительной балки можно пренебречь. Полоса пропускания фильтра зависит от отношения коэффициентов жесткости соединительной балки (kgij) и балки резонатора (кг) и определяется следующим выражением: ширина полосы пропускания = Jl ksij knij kr (5.87) где /l - центральная частота фильтра, knij - нормализованный коэффициент связи, используемый при проектировании фильтра. Разработчики стремятся проектировать резонаторы с небольшой разницей между резонансными частотами, поскольку от этого зависит добротность фильтра: /2-/1 = А (5.88) При выполнении этого условия фильтр обладает плоской и симметричной частотной характеристикой, а резонаторы имеют одинаковые полосы пропускания шириной 3 дБ и одинаковые резонансные амплитуды. Другими словами, разность резонансных частот резонаторов равна 3-дБ ширине полосы фильтра. Для получения крутого среза и плоской частотной характеристики фильтра требуется параллельно подключать большое число резонаторов. Требуемое количество резонаторов можно определить по формуле: fu-h (5.89) где fu - самая высокая резонансная частота, fi - самая низкая резонансная частота. Для такого фильтра, состоящего из п последовательных резонаторов, выражение передаточной функции, полученное при помощи уравнения (5.85), принимает следующий вид: = jVpexVpe \- у ех \--/ вых ч2п , Г1 / , ,\2п-1 (5.90) Cini.JA + C2n-{2r + ... + Со На рис. 5.12 показаны фотография фильтра, его механическая модель и соответствующая ей электрическая эквивалентная схема. 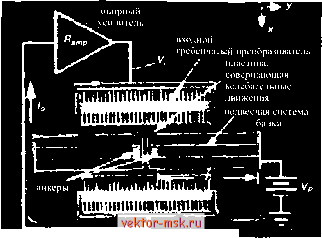
Ц Ci я, /-2 Сг Яг -з з i С,г1 Саз.. Сп Рис. 5.12. а - фотография и механическая модель микромеханического фильтра, б - его эквивалентная схема. Репродукция из книги К. Wang, С.Т.-С. Nguyen, 1997, High-order Micromechanical filters*. Proceedings of 1997 International Microelectromechanical Systems Workshop, IEEE, Washington, DC: 25-30 с разрешения IEEE, ©1997 IEEE Выражения для эквивалентной массы, коэффициента упругости и коэффициента затухания для г-го резонатора механической модели могут быть записаны так (Lin, Howe, Pisano, 1998): Mi = Mpi + о.зтимы, кг = 2Ej,h (5.91) (5.92) Di = (5.93) где Мрг - масса пластины и Мы - масса опорной балки г-го резонатора, Wi и Li - ширина и длина подвесной системы г-го резонатора, h - толщина структур из поликремния, а. Ер - их модуль Юнга. Коэффициент жесткости соединительной пружины определяется при помощи выражения: hjEphfpy (5.94) Используя электромеханические аналогии, описанные в главе 1, получим параметры электрической эквивалентной схемы, соответствующие механическим параметрам фильтра (Lin, Howe, Pisano, 1998):
Теоретически коэффициент усиления эквивалентной схемы на рис. 5.12 определяется при помощи уравнения: \ ох J вх (5.100) В рассматриваемой модели предполагается, что массой соединительной балки можно пренебречь. Однако от этого предположения можно отказаться, если длину балки сделать равной четверти длины волны. В этом случае ее масса не будет сказываться на свойствах фильтра. Тогда длину и ширину балки надо выбирать, исходя из следующих уравнений (Wang, Nguyen, 1997): sin а sinh а-I-cos а cosh а = О, Ela sin а + sinh а - Lb cos а cosh а - 1 (5.101) (5.102) где . ,2 4 1/4 12 (5.103) (5.104) 3. А - площадь поперечного сечения балки. Было показано, что при увеличении частоты размеры резонаторов становятся меньше, поэтому существует предельная частота, выше которой выражения для определения резонансной частоты и других параметров фильтров становятся не совсем корректными. В этом случае для оценки резонансной частоты применяют метод распределенной матрицы (Wang, Nguyen, 1997). Тогда эффективная сосредоточенная масса и коэффициент упругости задаются следующими выражениями: Mr = кг - UlQirir. Пблнак М:ин€!тическ&я энергия системы равна: КЕполн = о^о-о, где Xq - амплитуда колебательного движения, а Mq ная эквивалентная масса в любой точке резонатора: Мо = Мр + -Mt + -Мь. (5.105) (5.106) (5.107) эффектив- (5.108) В уравнении (5.108) индекс р соответствует пластине, совершающей колебательные движения, t - подвесной системе, а. b - опорной балке. Параметры электрической эквивалентной схемы получаются из уравнений (5.95)-(5.98). Для этого в них подставляют выражения Глава 5. Высокочастотные микрофильтры для массы (5.104) и коэффициента упругости (5.106). Уравнение для резонансной частоты в данном случае можно записать в виде: -И V2 4- 35 fr = 27Г / WV ( 1 12 2Eh[j-\ iMp + -Mt + ~Mb (5.109) Эквивалентная схема, полученная таким образом, может применяться для большинства практических задач. Однако следует помнить, что в ней не учитываются паразитные эффекты, возникающие в подложке. Проблемы, связанные с этими эффектами успешно решаются методами КМОП интеграции, что позволяет также улучшать частотную и фазовую стабильность системы (Nguyen, Howe, 1993). Построение эквивалентной схемы при моделировании микрофильтров используется для анализа их работы в случае изменения характеристик материалов, структур и геометрических размеров. Однако для точного прогнозирования механических, электромеханических и электрических рабочих характеристик таких систем необходимо применение более сложных методов моделирования на основе современного программного обеспечения. Например, для моделирования сложных систем подходит программа MEMCAD (Gilbert et al, 1993). Для решения проблемы, связанной с залипанием и изнашиванием электродов в процессе эксплуатации, был разработан привод электростатического отталкивания (Lee, Cho, 2001). В таком приводе (рис. 5.13) сила отталкивания возникает в результате несимметричности электрического поля в плоскости расположения электродов, что заставляет подвижный электрод скользить в указанном направлении. Для определения величины силы, резонансной частоты и добротности такой структуры обычно применяют метод конечных элементов (Lee, Cho, 2001). электрод 3 (стационарный)  электрод 2 (стационарный) i. электрод 1 (подвижный) Рис. 5.13. Электростатический привод с силой отталкивания. Репродукция из книги К.В. Lee, Y.-H. Cho, 2001, Later-ally driven electrostatic repulsive-force microactuators using asymmetric field distribution*, Journal of Microelectromechanical Systems 10; 128-136 с разрешения IEEE, ©2001 IEEE 5.3. Микрофильтры 5.3.3. Микрофильтры, использующие электростатически связанные балочные резонаторы Гребенчатые приводы обладают линейной передаточной функцией между перемещением и напряжением, что делает их очень привлекательными для использования в фильтрах. Однако такие приводы, как правило, очень громоздки. Вспомним, что выражение для резонансной частоты для самой простой системы, состоящей из массы, подвешенной на пружине, имеет вид: 27Г (5.110) Отсюда видно, что для увеличения резонансной частоты необходимо или увеличивать коэффициент упругости структуры, и/или уменьшать ее массу. Уменьшение массы гребенчатой структуры возможно только до определенных пределов, значит, предпочтительнее использовать второй вариант. Альтернативная конфигурация высокочастотного фильтра на основе двух связанных резонаторов показана на рис. 5.14 (Ваппоп, Clark, Nguyen, 2000). Каждый резонатор состоит из балки, закрепленной на двух концах. Также разработана конструкция резонатора из балки, свободной на обоих концах (Wang, Wong, Nguyen, 2000). Хотя по своей природе такие фильтры нелинейны, для небольших сигналов их все же можно считать линейными. Напряжение, приложенное между электродом, расположенным под балкой, и фиксированным электродом на подложке, заставляет балку двигаться вниз за счет электростатической силы притяжения. Это движение передается на связанную балку второго резонатора, которая работает как емкостной преобразователь, реагирующий на перемещение балки. Динамический анализ, представленный в этой главе, подходит и для балочного резонатора. Входное напряжение состоит из постоянной сдставляющей - напряжения смещения Vp и динамической составляюш;ей - переменного сигнала v. Выражение для резонансной частоты в данном случае имеет вид (Ваппоп, Clark, Nguyen, 2000): 1.03А; ( -pj [1 -g{d,Vp)]y , (5.111) где h и L - толщина и длина б,алки резонатора, функция д моделирует влияние приложенного напряжения на снижение эффективного |
||||||||||||||||||||||||||||||||||||||















