
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [ 58 ] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 356 Глава 5. Высокочастотные микргмьтры 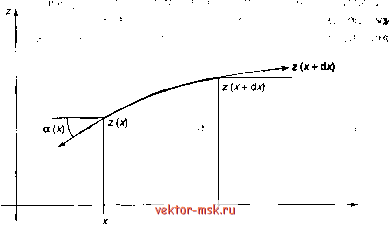 x + dx Рис. 5.8. Распределение напряжений в натянутой струне. Репродукция из книги M.Rossi, 1998, Acoustics and Electroacoustics, Artech House, Norwood, MA, с разрешения Artech House, ©1988 Artech House В вектсфШой форме уравнения (5.72) и (5.74) приобретают вид: dVx -If, (5.75) (5.76) r-dx Рис. 5.9. Эквивалентная схема для струны, построенная при помопщ модели линии передач. Репродукция из книги M.Rossi, 1998, Acoustics and Elcctmacoustics, Artech House, Norwood, MA, с разрешения Artech House, ©1988 Artech House Очевидна схожесть этих выражений с уравнени.я[ми тока и напряжения (5.37) и (5.38) для линии передач. Таким образом, для построения эквивалентной схемы для струны, можно воспользоваться электромеханическими аналогиями (рис. 5.9). Скорость распространения волны в струне определяется выражением: (5.77) 5.3. Микрофильтры 5.2.3. Основные элементы механических фильтров Механические фильтры состоят из последовательности резонаторов, соединенных при помощи элементов, рассмотренных выше. Все эти компоненты влияют на рабочие характеристики фильтров. Например, количество резонаторов определяет форму сигнала на выходе фильтра, а от их резонансной частоты зависит центральная частота полосы пропускания фильтра. Коэффициент упругости соединительных проводов и эквивалентная масса резонатора влияют на ширину частотной полосы фильтра. Теперь перейдем к рассмотрении механических микрофильтров, при этом будем использовать знания об их традиционных аналогах. 5.3. Микрофильтры Механические микрофильтры разрабатываются на основе принципов построения традиционных механических фильтров. Однако при разработке микроустройств всегда приходится учитывать размеры структур, соразмеримые с длиной волны, неидеальность граничных условий и прочие эффекты нелинейности. Поэтому не все конструкции, обсуждаемые ранее в этой главе, можно реализовать в микрофильтрах. Разработчики стремятся разрабатывать микрофильтры, размеры которых позволяют их интегрировать с другими элементами схем на одном кристалле. Традиционные фильтры, реализованные на кварцевых генераторах, не подходят для такой миниатюризации. Поэтому в последние годы большое внимание уделялось разработке микрофильтров на основе механических фильтров, изготавливаемых по традиционным технологиям производства ИС, которые легко интегрируются с остальными элементами схем. При использовании последовательности резонансных контуров, соединенных друг с другом, улучшаются рабочие характеристики микрофильтров. В общем виде, количество контуров определяет порядок фильтра (порядок фильтра - это порядок его полиноминальной передаточной функции). Чем выше порядок фильтра, тем лучше его частотная избирательность. Но при повышении порядка фильтра, возрастают вносимые потери, что может быть скопменсирова-но высокой добротностью разрабатываемых фильтров. В этой главе будут рассмотрены только электростатические микрофильтры, хотя на практике применяются другие механизмы управления. В традиционных электромеханических фильтрах обычно используются приводы с параллельными пластинами. В микрофиль- Глава 5. Высокочастотные микрофильтры трах же самым распространенным являются электростатические гребенчатые приводы, совершающие колебательные движения в плоскости, параллельной подложке, которые будут рассмотрены в следующем разделе. 5.3.1. Электростатический гребенчатый привод Хотя электростатический привод с параллельными пластинами и подходит для построения микрофильтров, такая конфигурация приводит к нелинейности характеристик фильтра, что вызывает частотную нестабильность при фильтрации сигналов (Nguyen, 1995). Поэтому для разработки микрофильтров предпочтительнее использовать другие конструкции электростатических приводов. На рис. 5.10 показана одна из таких конструкций - схема горизонтального электростатического гребенчатого привода (Tang, Nguyen, Howe, 1989). Конфигурация гребенчатых приводов, как правило, состоит из двух резонаторов. Возможны два варианта структур. Первый вариант - двухпортовая конфигурация, в которой один гребенчатый резонатор является управляющим элементом, а второй - чувствительным, реагирующим на изменение емкости. Во втором варианте оба гребенчатых резонатора управляются по отдельности, в то время как сенсорные функции выполняются за счет отслеживания фазового сдвига импеданса при выполнении условий резонанса. Система крепления поддерживающей балки обладает большой упругостью, что позволяет снижать остаточное напряжение в структурном слое. поддерживающая слой заземления балка зубцы гребенки анкер д стационарный электрод Рис. 5.10. Горизонтальный электростатический гребенчатый привод. Репродукция из книги W.C. Tang, Т.С.Н. Nguyen, R.T. Howe, 1989, Lat-erally driven polysilicon resonant. microstructures . Sensors and Actuators 20: 25-32 с разрешения Elsevier Science, ©1989 Elsevier Science В двухпортовой конфигурации и управляющая сила, и чувствительность на выходе пропорциональны изменению емкости, вызванного горизонтальным смещением гребенчатого механизма, дС/дх. 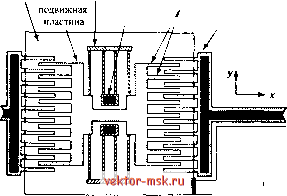 5.3. Микрофильтры При подаче управляющего напряжения vd смещение равно (Tang, Nguyen, Howe, 1989): ks 2ks дх (5.78) где Fx - составляющая электростатической силы, направленная вдоль оси х, a,ks - коэффициент упругости системы. Предполагая, что крепления поддерживающей балки являются жесткими, можно записать аналитическое выражение для коэффициента упругости: ks = 2А-Г = 2Eh (5.79) Для обеспечения стабильности управляющее переменное напряжение с амплитудой Vd смещается при помощи постоянного напряжения Vp: Vd = Vp + Vd smut. (5.80) Для снижения управляющего напряжения в приводах данного типа между электродами необходимо делать очень маленький зазор. Для получения субмикронных зазоров подходит метод окисления совместно с соответствующей послеоперационной юстировкой (Hirano et al, 1992). Подставляя уравнение (5.80) в выражение (5.78) и дифференцируя его по времени, получаем: 1 дс dVl dt 2ks дх dt 2к, дх {2VpVdOJ cos (jjt + vjcj sin 2ujt) . (5.81) Для случая, когда амплитуда переменного напряжения намного меньше постоянного напряжения смещения, членом второй гармоники в правой части выражения (5.81) можно пренебречь. Для получения модуля Йлектромеханической передаточной функции, равной отношению вектора перемещения X к вектору управляющего напряжения Vd при выполнении условий резонанса, модуль выражения (5.81) умножается на величину добротности: VpujQ дС ks дх (5.82) Из этого выражения видно, что поскольку величина дС/дх не зависит от смещения х, гребенчатый привод имеет линейную электро- Глава 5. Высокочастотные микрофильтры механическую передаточную функцию, устанавливающую зависимость между смещением и управляющим напряжением. Необходимо помнить, что это справедливо только для случая, когда амплитуда переменной составляющей управляющего напряжения гораздо меньше постоянного напряжения смещения. Вьфажение для оценки добротности такой структуры имеет вид: {Mbks) (5.83) где d - зазор между пластинами и подложкой, /i - абсолютная вязкость воздуха. Ар - площадь поверхности пластины, а Мь - масса поддерживающей балки. На практике добротность системы регулируется при помощи последовательных резисторов, подключаемых к входным и выходным цепям (Nguyen, 1995). Величина тока на сенсорном порту схемы определяется следующим выражением: где Vg - напряжение на сенсорном электроде. Подставляя уравнение (5.81) в выражение (5.84), находим модуль прсюодцмости всей резонансной структуры: s VpVsuQ (dcV дх (5.85) Резонансная частота структуры определяется по формуле Релея: fr = 27Г VMp + 0.3714Mb 27Г -I 1/2 Mp + 0.3714Мб (5.86) При изготовлении гребенчатых приводов применяется одна маска, что значительно упрощает их разработку и позволяет снизить их стоимость. Для снижения паразитной емкостной связи между входным и выходным портами в систему включается планарный электрод заземления, который также используется для подавления нежелательных видов колебаний. 5.3. Микрофильтры 5.3.2. Микрофильтры, использующие гребенчатые приводы Для улучшения рабочих характеристик фильтров несколько резонансных структур соединяются вместе: либо последовательно, либо параллельно. На рис. 5.11 показаны варианты таких соединений (Lin et al, 1992). В последовательном фильтре для объединения двух резонаторов используется соединительная пружинная конструкция. гребенчатый преобразователь соединительная пружина первый резонатор порт передачи сигнала смещение по постоянному току аналоговый инвертор 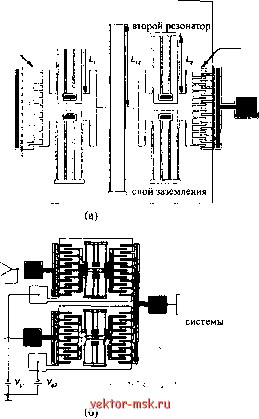 сенсорный порт усиление импеданса ~ , Рис. 5.11. Соединение резонаторов; а - последовательное, б - параллельное. Репродукция из книги L. Lin, С.Т.-С. Nguyen, R.T. Howe, А.P. Pisano, 1992, .Micro electromechanical filters for signal processing*, IEEE Conference on Micro Electro Mechanical Systems 9?., February 4-7 1992, IEEE, Washington, DC с разрешения IEEE, ©1992 IEEE В параллельной конфигурации полосового фильтра входные и выходные выводы резонаторов соединяются параллельно таким обра- |















