
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Пьезорезистивные чувствительные элементы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 [ 48 ] 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 разной толщиной проводников (Park et al, 1997b). Из рисунка видно, что при изменении толщины металлизации от 1.1 мкм до 4.1 мкм добротность увеличивается до 20.1 при частоте 3.25 ГГц. На рис. 4.296 показаны зависимости добротности от частоты для прямоугольных и спиральных индукторов, состояшцх из 8 витков, изготовленных на различных кремниевых подложках.
24 - а
(2 мкм металл). 2 КПст (1.1 мкм металл) □ 2 КПст А а 30-50 Пет-▼ v 4-6 Пет 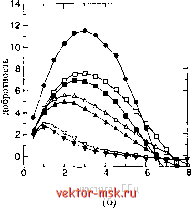 0 2 4 6 8 частота, ГГц Рнс. 4.29. Зависимость добротности: а - от толщины металлизации, б - от удельного сопротивления подложки. Репродукция из книги М. Park, C.S. Kin, J.M. Park, Н.К. Yu, K.S. Nam, 1997b, High Q microwave inductors in CMOS double metal technology and its substrate bias effects for 2 GHz RF 1С application)), Proceedings of lEDM 97, IEEE, Washington, DC: 59-62 с разрешения IEEE, ©1997 IEEE . , 4.3.6. Поворачивающиеся индукторы Из данных раздела 4.3.5 видно, что паразитная емкость уменьшается, тогда, когда катушка отделена от подложки. Э.то может быть выполнено удалением подложки снизу индуктора или введением воздушного зазора между катушкой и подложкой. Серьезным недостатком такого подхода является ограничение максимально достижимого расстояния между индуктором и подложкой. Способы травления и механическая прочность подложки после вытравливания в ней больших углублений также влияют на максимальную величину зазора. Необходимость применения различных технологических методов приводит к сложности интеграции ВЧ компонентов на одной 
2 3 4 частота, ГГц (б) Рис. 4.30. а - Трехвитковый спиральный индуктор, повернутый после процесса самосборки; б - изменение добротности от частоты для разных углов поворота катушки относительно подложки. Во всех случаях применялись индукторы из меандров с 41/2 периодами и индуктивностью ЗнГн. Репродукция из книги G.W. Dahlmann, Е.М. Yeatman, 2000, High Q microwave inductors on silicon by surface tension self-assembly , Electronics Letters 36(20): 1707-1708 с разрешения IEEE, ©2000 IEEE В работе (Dahlmann, Yeatman, 2000) предложена технология самосборки индукторов методом плавления. Эта технология позволяет создавать индукторы, в которых катушка не только отделена от подложки, но и имеет возможность поворачиваться в плоскости, перпендикулярной подложке. Спиральные индукторы и индукторы из меандров, изготовленные по такой технологии на подложке с низким удельным сопротивлением, продемонстрировали повышение добротности с 4 до 20. Планарные медные индукторы изготавливаются с расплавляющимися прокладками, размещаемыми между за-крепленн{>1ми и свободными частями устройства. При нагревании подложки прокладки расплавляются, и за счет сил поверхностного натяжения структура поворачивается. При охлаждении подложки прокладки вновь затвердевают. На рис. 4.30 а показан спиральный индуктор по окончании процесса самосборки. На рис. 4.30 6 показано влияние угла отклонения катушки от подложки на величину добротности. Из рисунка видно, что при увеличении угла добротность и частота, соответствующая максимальной добротности, значительно возрастают, что связано с уменьшением емкости между подложке. Поэтому существует потребность в разработке унифицированных методов изготовления пассивных микрокомпонентов. катушкой и подложкой. Также видно, что неповернутый, но отделенный от подложки индуктор, имеет на частоте 0.5 ГГц максимальную добротность, равную 4, в то время как у индуктора, перпендикулярного подложке, добротность на частоте 3 ГГц составляет 21. Другой подход для отделения катушки от подложки - построение поднимаюшегося самособираюшегося микроиндуктора (MESA-индуктора), предложенного в работе (Fan et al, 1998). Было показано, что для изготовления пассивных элементов, таких как индукторы и переменные конденсаторы, подходит MESA-платформа высотой 250 мкм и площадью 5 мм х 5 мм. Из рис. 4.31 видно, что высота MESA-структуры определяется длиной боковой опоры. 3D MESA-структуры изготавливаются по поверхностной технологии из трех слоев поликремния в Microelectronics Center of North Carolina (MCNC). Спиральный индуктор формируется в центре платформы. Микроприводы начинают двигаться друг к другу, поднимая индуктор вертикально и подвешивая его над подложкой. Для изменения высоты вертикального зазора микроприводы могут либо толкать, либо тянуть микроструктуру с двух концов, преобразуя поперечное движение в вертикальное перемешение.  Рис. 4.31. а - MESA-индуктор, б - центр платформы может опускаться или подниматься. Репродукция из книги L. Fan, R.T. Chen, А. Nepolsa, М.С. Wu, 1998, ((Universal MEMS platforms for passive RF componenets: syspended inductors and variable capacitors . Proceedings of 11* Annual International Workshop on MEMS 98 IEEE, Washington, DC:29-33 с разрешения IEEE, ©1998 IEEE 4.3.7. Моделирование и расчет планарных катушек индуктивности Ключевыми параметрами при проектировании индукторов являются внешние размеры, ширина и расстояние между металлическими дорожками, толщина слоя металлизации, количество витков спира- ли и материал подложки. Характеристики материалов, используемых для изготовления микро- и нано-структур микроиндукторов, сильно зависят от их объемных свойств. Поэтому для их проектирования необходимо применять 2D и 3D методы моделирования, например, такие как метод конечных элементов. Можно очень точно рассчитать микроиндуктор при помощи программного обеспечения MagNet, основанного на 3D методе конечных элементов, (Mohan et al, 1999), однако, это очень трудоемкий процесс, требующий больших затрат времени. Этот программный пакет лучше использовать не для разработки микроустройств, а для проверки их работоспособности. Для проектирования предпочтительнее применять комбинацию 2D и 3D моделирования (Driesen et al, 1999), расчета температурных и механических характеристик (Ribas et al, 2000), полного описания геометрии микроустройства (Sieiro et al, 2001), моделирования параллельных двойных и одиночных линий передач (Cahana, 1983, Koutsoyannopoulos, Papananos, 2000, Long, Copeland, 1997), методов анализа линий (Schmuckle, 1993), классических методов анализа схем и цепей (Nickneijad, Meyes, 1998), расчетных уравнений Брайена (Li, 1996) и физического моделирования (Yue, Wong, 2000). В работе (Mohan et al, 1999) приведены простые уравнения для расчета индуктивности квадратных, гексагональных, октогональных и круговых спиральных форм, а также проведено сравнение вычисленных и экспериментально определенных данных. Планарные индукторы из меандров можно изготовить при помощи стандартных методов изготовления ИС. Но из-за отрицательных значений взаимной индуктивности они имеют очень низкие значения индуктивности. Спиральные индукторы обладают более высокими значениями индуктивности, что связано с их планарной природой. Однако для них требуются дополнительные соединения между внутренним концом катушки и внешними выводами, что приводит к возникновению больших паразитных емкостей. К тому же магнитный поток планарной спиральной катушки, направленный пер-пендикуля)но, может интерферировать с нижележащими схемами в многомодульной микросистеме. Индукторы соленоидного типа лишены этих недостатков, но они очень сложны в изготовлении. Планарный индуктор может быть представлен в виде эквивалентной схемы, состоящей из сосредоточенных элементов, как показано на рис. 4.32. Здесь - индуктивность спирали, Cs - краевая емкость, Rs - последовательное сопротивление спирали, Coxide - емкость оксида между металлической спиралью и кремниевой под- -,1/2- 1 1/2\ где 1п(£>) ln{d) - 1 / ;\2 1 /г(;\4 1 /w i2\d) eowJ TesW (4.17) (4.18) oxide Рис. 4.32. Эквивалентная планарного индуктора схема В литературе, для планарного индуктора используются несколько различных определений добротности. Чаще всего под добротностью понимают отношение запасенной энергии к рассеиваемой мощности за один цикл. При частоте, гораздо меньшей резонансной частоты, реактивное сопротивление индуктора является индуктивным. В таких случаях добротность можно определить как: wL (4.19) где R - последовательное сопротивление. Когда индуктор используется в качестве резонансного компонента, добротность определяется как отношение резонансной частоты /resonance к ширине полосы ЗдБ (3-dB BW): 3-dBBW Однако в ВЧ и СВЧ схемах индукторы чаще всего работают на частотах ниже частоты их собственного резонанса. В таких случаях добротность называется эффективной Qeff, которая определяется как отношение мнимой части входного импеданса к его действительной части при заземлении одного из входных портов. Выражение для Qeff имеет вид: Qeff = ujLs RCs + Co) ~coLsiCs + Co) (4.21) Ha резонансной частоте добротность становится равной О, поскольку Im (Zin) = О, а Re (Zin) = max. При этом индуктивное сопротивление становится равным сопротивлению паразитной емкости. При частотах выше частоты резонанса реактивное сопротивление индуктора становится емкостным. Величина последовательного сопротивления Rg может быть получена из выражения для свободной микрополосковой линии шириной го, толщиной t, проводимостью а и магнитной проводимостью р: R. = 0.431а: l+OMl{w/t) Хи, > 2.5 1.1147-Ы.2868а: 1-19 1.2296 + 1.287x3 + 0.0035 (f-) И Rs = 1 + 0.0122жЗ+ 1? X,., < 2.5. (4.22) (4.23) Последовательная емкость Cg определяется как емкость между проводами спирали и проводами внешних подсоединений. Со - емкость подложки, определяемая емкостью между полосками и слоем заземленид. Показатель эффективности индуктора (FMI) определяется как (ВаЫ, 2001): Qeff fresonance FMI = площадь индуктора (4.24) Цель разработчика - построение индуктора с наибольшим значением FMI. ложкой, Csi - емкость кремния, а Rgi - сопротивление кремния. Величина Lg определяется суммой индуктивностей Li каждого прямого сегмента и взаимных индуктивностей Mij между г-м и j-м элементами. Уравнение (4.1) в данном случае может быть записано в виде (Ribas et al, 2000): , f*.. ..... .? , L,-L, + Mi,. (4.16) i=i 1=1 j=i Величина Mij зависит от длины полосок / и расстояния между ними d: |
||||||||||||||||||||||||||||||||||||||||||||















