
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 [ 98 ] 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 +и,.(8...15)В -о 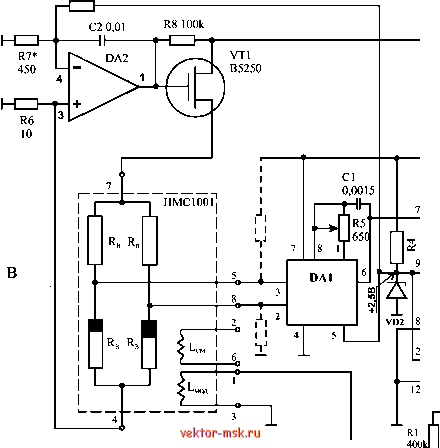 DA1 -инструментальный усилитель АМР-04 в типовом включении; DA2 - операционный усилитель LMC7101; DDI - 16-битовый аналого-цифровой преобразователь Cs5509; VD2 - стабилитрон LM440.
+Un(5B) о 16 Й 19 , +Un.(9Bj VDl 2N6028 Cl 4 R3 120k R2 300k Puc. 6.47. Принципиальная схема входного каскада электронного компаса с цифровым интерфейсом и источником тока [50] Для обеспечения приемлемой точности определения азимута магнитные датчики (рис. 6.46-6.47) должны устанавливаться в горизонтальном положении относительно поверхности Земли. На рис. 6.48 приведена принципиальная схема входного устройства электронного компаса с использованием двухканальной магниторезисторной схемы типа НМС 1002 [49]. Особенностью данного варианта схемы прибора (рис. 6.48) является возможность регистрации векторов магнитного поля, воздействующих в двух взаимно перпендикулярных направлениях X и Y. Эта схема позволяет учитьшать угол наклона датчика относительно плоскости горизонта, что значительно повьппает точность определения азимута. Схема не требует особых пояснений. Основные параметры и характеристики магниторезисторных ИС серии НМС приводятся в главе 24 т. 2. На рис. 6.47 приведена доработанная принципиальная схема входного устройства электронного компаса с использованием датчика НМС 1001. В эту схему введен стабилизатор тока питания датчика, вьшолненный на операционном усилителе DA2 и полевом транзисторе VT1. R9*22k 17 о- 20 15 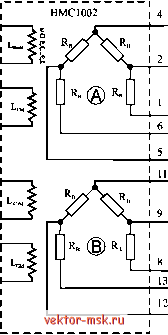 R* 640 -L +2,5В +5В о R. 640 +Un (5
16 g 15 PQ 1 I Rl 400k +Un.(9Bj VDl 2N6028 R3 120k CI 4, -о R2 300k DA1,DA2 -инструментальные усилители АМР-04 в типовом включении; DDI - 12-битовый аналого-цифровой преобразователь TLC2543; VD2 - стабилитрон LM440. Рж. 6.48. Принципшшьная схема входного устройства электронного компаса с жпользованием магниторезисторной схемы типа НМС1002 6.4.6. Промышленные образцы ориентационных МД, реализованных с использованием ИС серии ПМС Фирма Honeywell на основе магнитных датчиков серии НМС вьшускает ряд снециализированных магнитоэлектронных устройств, нредназначенных для применения в навигационной аппаратуре и приборах различного назначения. Среди них можно отметить HMR2300, HMR2300r и HMR3000. Интеллектуальный цифровой магнитометр ПМК2300 Вьшолнен в виде отдельного магнитоэлектронного модуля. Представляет собой универсальный цифровой 3-координатный магнитометр. Прибор регистрирует магнитное поле, направленое по любой из трех осей (X, Y, Z).B состав магнитометра входят гибридный магнитный датчик типа НМС2003, три 16-разрядных АЦП, микропроцессор и СНЗУ. Результаты измерений последовательно вьшодятся через стандартный 9-штьфьковый разъем в двоично-десятичном (или двоичном) коде на скорости от 10 до 154 Гц. Для вывода информации используются стандартные интерфейсы RS-232 или RS-485. Магнитометр смонтирован на одной печатной плате прямоугольной формы, размеш;енной в алюминиевом корпусе. Максимальные габариты - 102X38, IX 28,7 мм, масса - 100 г. Магнитометр HMR2300 используется в навигационной аппаратуре различных транспортных средств, в автоматизированном оборудовании для управления технологическими процессами в металлургии, в оснаш;ении специализированных лабораторий, в аппаратуре для обнаружения магнитных аномалий, изделий и объектов из ферромагнитных материалов. Интеллектуальный цифровой магнитометр ПМК2300г Вьшолнен в виде отдельного магнитоэлектронного модуля. Представляет собой специализированный цифровой 3-координатный магнитометр, разработанный для применения в авиационной и космической навигационной аппаратуре. Прибор регистрирует магнитное поле, направленое по любой из трех осей (X, Y, Z). В состав магнитометра входят гибридный магнитный датчик типа НМС 2003, три 16-разрядных АЦП, микропроцессор и СПЗУ. Результаты измерений последовательно выводятся через стандартный 9-штьфьковый разъем в двоично-десятичном или двоичном коде на скорости от 10 до 154 Гц. Для вывода информации используются стандартные интерфейсы RS-232 или RS-485. Магнитометр смонтирован на одной круглой печатной плате. Максимальные габариты - 072X15,3 мм, масса - 40 г. Прибор соответствует требованиям стандарта MIL-STD-810E для военных и космических применений. Цифровой модуль компаса HMR3000 Представляет собой цифровой 3-координатный магнитометр с 2-координатным датчиком наклона. Прибор регистрирует магнитное поле, направленое по любой из трех осей (X, Y, Z)n обеспечивает определение азимута при его наклоне до ±45°. В модуле используется гибридный магнитный датчик типа НМС 2003. Кроме того, в состав модуля входят 16-разрядные АЦП, микропроцессор и СПЗУ. Результаты измерений последовательно выводятся через стандартный 9-штьфьковый разъем в двоично-десятичном или двоичном коде на скорости 20 Гц. Для вывода информации используются стандартные интерфейсы RS-232 или RS-485. Вьшускаются несколько вариантов прибора: в виде отдельной печатной платы или в алюминиевом корпусе. Максимальные габариты - 82,6X25,4X22,3 мм, масса - 60 г. Цифровой модуль HMR3000 предназначен для применения в океанографии, навигационных приборах водного транспорта и подводных лодок, бакенов, бурового и шахтного оборудования, наземных транспортных средств, авиационной и космической техники. Может работать совместно с GPS системами. Основные параметры и внешний вид приборов типа HMR2300, HMR2300r и HMR3000 приводятся в главе 24 тома 2. 6.4.7. Устройство для определепия вектора МП с применепием ЭХ Из рассмотренных в главе 2 принципов и диаграмм направленности ПМП видно, что для измерения направления В могут быть использованы элементы Холла, у которых диаграмма направленности близка к идеальной в слабых магнитных полях. При этом принципиально возможны два способа определения направления вектора В: по максимуму или по минимуму выходной величины. Известно, что чувствительность к угау поворота элемента Холла является функцией угла ОС между направлениями В магнитной оси элемента = X Вх sin а Следовательно, если определение направления В производится по максимуму выходной величины (а=> О), то чувствительность оказьшается стремящейся к нулю. С учетом этого в подавляющем большинстве случаев направление вектора В определяется по минимуму выходной величины элемента Холла. Тогда достигает своего максимального значения S = S х В. а.макс В В настоящее время наибольшее значение магнитной чувствительности (примерно 5 В/Тл) получено у пленочных элементов Холла, изготовленных из антимонида индия [7, 20]. Таким образом, наибольшее достижимое значение S ,скажем, при измерении направления горизонтальной составляющей магнитной индукции поля Земли В^ = 0,15 X 10 Тл в районе п С. Петербурга равно 75 X 10 В/рад = 1,3 В/градус. Порог чувствительности элемента Холла по углу поворота, как и в любом другом случае, определяется соотношением между и нестабильностью (дрейфом) его нулевого сигнала U,. Если элемент Холла питать от источника переменного тока, позволяющего исключить взаимное влияние на нулевой сигнал элемента термо-ЭДС и термомагнитных явлений, то значение AU, будет определяться главным образом дрейфом напряжения неэквипотенциальности V. У лучших экземпляров пленочных ЭХ из антимонида индия эта величина даже при практически неизменной температуре окружающей среды за время измерения лежит в пределах (1-2) X 10 В. Исходя из этого, наименьший порог чувствительности элемента Холла по углу поворота при измерении той же горизонтальной составляющей В может быть равен 5-10 [7, 20]. Чувствительность измерительного устройства, в котором используется элемент Холла, может быть резко увеличена путем применения концентраторов магнитного потока, вьшолняемых в виде стержней из материала с высокой магнитной проницаемостью и малой коэрцитивной силой. Так, например, применение концентратора из пермаллоя или феррита длиной 500 мм и сечением 50 мм дает увеличение чувствительности примерно в 10. Однако снижения порога чувствительности при этом не происходит. Более того, он достигает 0,5° в поле Земли, что объясняется нестабильностью нулевого сигнала измерительного устройства в результате гистерезисных явлений в концентраторе. Подробнее см. [7]. |















