
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 [ 96 ] 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 6.4.5. Варианты устройств для определения вектора МП, реализованных с использованием принципа квазимодуляции Сопротивление магниторезисторов, соединяемых в мостовую схему, нельзя точно подогнать при их изготовлении. Это вызывает увеличение начального напряжения смещения моста U, величина которого, как правило, гораздо больше, чем ожидаемое регистрируемое напряжение. Все эти параметры датчика имеют значительный разброс и сильно зависят от температуры. При проектировании навигащюнной аппаратуры эти источники погрешностей могут быть устранены различными способами. Одним из наиболее применяемых способов является принцип квазимодуляции магнитного потока, воздействующего на преобразователь магнитного поля. Для этого применяется вспомогательный источник магнитного поля, в качестве которого могут использоваться спещ1альные катушки смещения, встраиваемые непосредственно в преобразователь магнитного поля или размещаемые снаружи ПМП. Пршщип квазимодулящш показан на рис. 6.36. Модулящш магнитного потока осуществляется путем подачи на вспомогательный источник магнитного поля импульсов тока различной полярности, что соответственно приводит к изменению полярности магнитного поля, воздействующего на ПМП. Катушка Катушка смещения смещения  Преобразователь магнитного поля 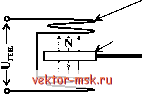 Преобразователь магнитного поля Рис. 6.36. Иллюстрация принципа квазимодуляции Примером технической реализащ1и указанного принципа может служить конструкция магнитного датчика, приведенная на рис 6.37. В данной конструкции магниторезисторный мост (например, KMZ10) размещается внутри катушки смещения. 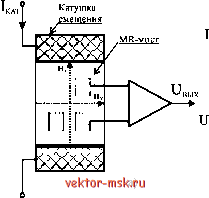 Ток Поляризация Смещение  Рис. 6.37. Иллюстрация принципа действия датчика с квазимодуляцией магнитного потока: а -конструкция датчика; б - эпюры тока через катушку смещения и напряжения на выходе датчика; в - напряжение на выходе MR моста Принцип работы такого устройства можно объяснить следующим образом. Па обмотку катушки смещения подаются двухполярные импульсы тока прямоугольной формы, что приводит к воздействию на МЧЭ двухполярного магнитного поля и появлению соответствующих сигналов на выходе моста. Так как постоянная составляющая зависит только от напряжения питания моста, то она никакого воздействия не оказьшает. Измеряемое напряжение пульсирует (рис. 6.376) и может изменять полярность. При помощи специальных схем фиксируют пиковые значения выходных сигналов, а затем эти значения вьгаитают друг из друга. Такая конструкция предполагает передачу и усиление постоянных напряжений. Чтобы рабочий диапазон магнитоэлектронного устройства бьш достаточно большим, нужно регулировать усиление измерительного тракта в широких пределах. Технически возможно сконструировать два идентичных усилителя постоянного тока, но не удается гарантировать одинаковые характеристики во всем рабочем диапазоне. Если оба сигнала проходят через один усилитель, то эту проблему можно решать путем демодуляции. Демодуляция сигнала обьгано осуществляется звеном, электрическая схема которого приведена на рис. 6.38. 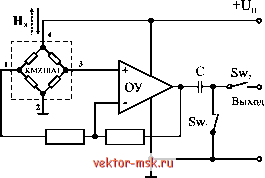 Общий Рж. 6.38. Упрощенная схема компенсации напряжения смещения и демодуляции сигнала Схема (рис. 6.38) работает следующим образом. При одном из нолунериодов конденсатор С на выходе усилителя через ключ Sw замьпсается на корпус ОУ, при этом он перезаряжается на существующий потешщал. При переключении направления ключ Sw размьпсается, ключ Sw замьпсается и удвоенный сигнал 2\5 поступает на выход. Такая схема компенсирует колебания параметров узлов, в том числе начальное постоянное смещения UcM- Так как динамический диапазон тонкопленочных магниторезисторов относительно мал, то часто возникает необходимость компенсащш паразитного магнитного поля, величина индукщш которого выходит за пределы динамического диапазона. Такая компенсация производится путем подачи постоянного напряжения определенной полярности непосредственно на катушку смещения. Функциональная схема входного устройства для определения направления на источник магнитного поля с использованием модуляции и компенсации приведена на рис. 6.39. Схема не требует особых пояснений [38].  ]У[одулятор MR-moot Предусилитель и схема компенсации смещения Фазочувствительный демодулятор Выход Регулятор тока Рис. 6.39. Упрощенная функциональная схема входного устройства для определения направления на источник магнитного поля Мост 2 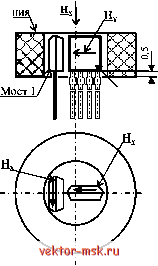 Рис. 6.40. Конструкция магнитного датчика с использованием двух мостов KMZ10 и катушки смещения сигналы Ujj и UY пропорциональные компонентам X и Y магнитного поля [13]. Магнитоэлектронное устройство может быть использовано для построения электронного компаса. Приведенная электронная схема не нуждается в специальной температурной коррекции, поскольку определение вектора направления поля связано с отношением двух сигналов, а не с их абсолютными величинами. 1У1ЭУ повышенной точности для определения вектора магнитного поля Фирмой Valvo (отделением электроники фирмы Siemens) предложен еще один вариант магнитоэлектронного устройства повьппенной точности [75]. Датчик магнитного поля этого устройства содержит три моста KMZ10. Каждый из мостов размещен в своей катушке смещения, подобно варианту, приведенному на рис. 6.34. Вариант конструкции сенсорной головки приведен на рис. 6.42. Для создания головки предложена трехфазная система, состоящая из трех датчиков, расположенных под углом 120° друг к другу (рис. 6.42.а). 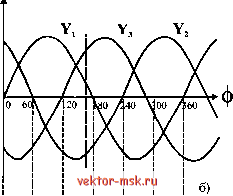 0° 30 60 90 120150180210240270300330360°
Puc. 6.42. Вариант конструкции сенсорной головки: а - схема размещения датчиков; б -эпюры выходных сигналов трех сенсоров, смещенных на 120° при вращении в магнитном поле; в - таблица полярностей сигнала в пределах 30° Простое 2-координатное магнитоэлектронное устройство для определения вектора магнитного поля Конструкция магнитоэлектронного устройства приведена на рис. 6.40. В данном МЭУ используется 2-координатный ориентационный магнитный датчик, который содержит два моста типа KMZ10. Мосты располагаются перпендикулярно друг другу и закрепляются внутри одной катушки смещения. Катушка смеше Катушка смещения содержит 100 витков медного провода диаметром 0,35 мм. Сопротивление катушки постоя1шому току - 0,6 Ом, индуктивность - 87 мкГн, напряженность осевого магнитного поля -8,3(кА/м)/А. Принципиальная электрическая схема устройства приведена на рис. 6.41. Принцип действия магнитоэлектронного устройства достаточно прост. Генератор прямоугольных импульсов вьшолнен на микросхемах DD4.1, DD4.2, DD3, DD4.3, DD4.4, DD4.5, DD4.6 и транзисторах VT1, VT2. Папряжение с выхода генератора через разделительный конденсатор С7 и резистор R15 подается на катушку смещения L1 (рис. 6.41). Частота следования импульсов составляет ~70 Гц. Переменные напряжения и с магниторезисторных мостов R1 и R2 через дифференцирующие цепи С1, R3 и С2, R9 поступают на операционные усилители DA1.1 и DAI.2, а после усиления - на два синхронных демодулятора DDI, DD2, которые генерируют выходные |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















