
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 [ 93 ] 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 н X А 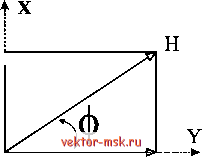 Рис. 6.22. Разложение вектора магнитного поля Земли на составляющие Полюсы геомагнитные - полюсы однородно намагниченного шара - и полюсы магнитные задают соответственно систему геомагнитных координат (широта геомагнитная, меридиан геомагнитный, экватор геомагнитный) и магнитных координат (широта магнитная, меридиан магнитный). Следует отметить, что понятия северный магнитный полюс и северный магнетизм, южный магнитный полюс и южный магнетизм не совпадают. Северный магнитный полюс Земли включает понятие южного магнетизма, а южный магнитный полюс - северного. (Подробнее см. [12,25].) Магнитные аномалии Отклонения действительного распределения геомагнитного ноля от динольного (нормального) называют магнитными аномалиями. Материковое магнитное ноле Земли имеет среднюю напряженность Н около 0,45 э. Однако на земном шаре существуют области магнитных аномалий, где напряженность магнитного ноля может превышать среднюю в 2-3 раза. Обычно сильные магнитные аномалии связываются с залежами магнегитовых (FeO, Ре,Оз) и титаномагнегитовых (примеси TiO,) руд, с залежами других пород, обогащенных магнетитом, с некоторыми нирроктиловыми (FeS) месторождениями. Примерами таких аномалий являются Кривой Рог, Кольские аномалии, аномалии на Урале и т.н. Наиболее сильной аномалией на земном шаре является аномалия в районе г. Курска и Белгорода, получившая наименование Курской магнитной аномалии (КМА). Напряженность ноля КМА (вертикальная составляющая) достигает здесь 1,5-1,91 э. Эта аномалия обьясняется наличием большого рудного теля под поверхностью Земли. Практическое использование явления земного магнетизма Известным примером использования явления земного магнетизма является изобретение компаса. Простешпий компас представляет собой круглую коробку из немагнитного материала, в центре которой на остром основании (например, на игле) установлена магнитная стрелка. Она располагается в плоскости магнитного меридиана в направлении север-юг. Точность определения направления простьпи компасом составляет 2-5°. Точность показаний современных судовых магнитных компасов в средних пшротах и при отсутствии качки достигает 0,3-0,5° [15]. К недостаткам магнитного компаса относится необходимость внесения поправки в его показания на несовпадение магнитного и географического меридианов (необходимость учитывать магнитное склонение) и поправки на девиацию - вращение Земли. Вблизи магнитных полюсов Земли и крупных магнитных аномалий точность показаний магнитного компаса резко снижается, в этих районах приходится пользоваться компасами других типов. Однако ни один из известных компасов (магнитный, радиокомпас, радиополукомпас, гирокомпас, гирополукомпас и т.п.) не могут обеспечить точного определения азимута во всех районах Земли при любой погоде, различных состояниях магнитосферы и радиопомехах. В связи с этим в морском и военном деле, в авиации применяют совместно компасы различных типов, на основе которых создают единые, комплексные, курсовые системы. Следует, однако, отметить, что точное определение положения объектов на поверхности Земли и в пространстве представляет собой сложную техническую задачу, которая решается при помощи магнитометрических систем контроля пространственного положения (МСКПП) с учетом многих факторов [9]. Другим важньпй направлением использования явления земного магнетизма является поиск и обнаружение полезных ископаемых, в первую очередь, железной руды по аномалиям магнитного поля Земли. В данной главе будут рассмотрены простые устройства, предназначенные для определения направления вектора магнитной индукции с точностью, достаточной для практического непрофессионального применения. 6.4.1. Принципы определения направления вектора магнитного ноля Земли На практике определение направления вектора магнитного поля Земли Н сводится к измерению напряженности двух его составляющих Н^и Н^ (рис. 6.22) с дальнейшим вьгаислением угла ф. Угол ф в этом случае определяется по формуле: Ну Н y.sm <р (6.2) Следует отметить, что зпачепия папряжеппости магиитпого поля, определеппые датчиком МП, могут колебаться как по амплитуде АН и по постоянной составляющей и Н^. С учетом этого уравнение (6.2) принимает следующий вид: tgф* = Я X sin (Р+ Нуд (Н +AH)xcos(p+H sin -h Я Я ДЯ.. Яуп (1+-)xcos + я Я (6.3) Как правило, для определения ориентации на плоскости используют не менее двух преобразователей магнитного поля. При этом их магниточувствительные элементы располагаются перпендикулярно друг к другу. Один датчик МП регистрирует другой - Н^. Так как абсолютные значения синуса и косинуса угла ф* равны при 45°, то вычисления производят только в этой области. Если предположить, что погрешность измерения И составляет 1%, то при угае 45° получают максимальное отклонение 1,1° [75]. Этот угол может быть больше, чем ошибка стрелочного компаса. Для достижения необходимой точности при определении направления менее 1%вработе [75] были сформулированы следующие требования к измерительной системе, предназначенной для определения вектора МПЗ: отклонение амплитуды смещения не должно превьппатъ 1% от максимального значения; диапазон измерений должен составлять от 20 до 100 А/м (от 0,25 до 1,25 гс или от 0,025 до 0,125 мТл); один датчик должен определять только одну составляющую поля в направлении измерения. Приборы, создаваемые для таких целей, часто назьшают ориентационными датчиками. 6.4.2. Выбор преобразователя магнитного поля При разработке аппаратуры и приборов для определения параметров магнитного поля Земли большое значение имеет выбор типа преобразователя магнитного поля. Для измерения параметров МПЗ наиболее широко используются такие ПМП, как тонкопленочные магниторезисторы, высокочувствительные элементы Холла, магнитоиндуктивные датчики и миниатюрные феррозонды (см. рис. 6.23). Основные параметры и характеристики указанных преобразователей приведены в главах 2 и 10. Пиже будут рассмотрены только те типы ПМП, которые специально предназначаются для определения параметров МПЗ и использования в навигационной аппаратуре и приборах. Наиболее распространенные типы преобразователей магнитного поля, используемые для определения направления на источник магнитного поля 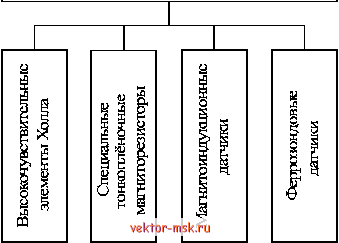 Рис. 6.23. Наиболее распространенные типы преобразователей магнитного поля, используемых для определения параметров магнитного поля Земли В табл. 6.3 приведены сравнительные параметры и характеристики преобразователей магнитного поля, применяемых для определения параметров магнитного поля Земли. Выбор типа ПМП осуществляется с учетом требуемых параметров и характеристик разрабатываемой аппаратуры, условий ее эксплуатации и целого ряда экономических факторов. Основное требование, предъявляемое к ПМП, предназначенньпи для этих целей, - это высокая и явно вьфаженная координатная магнитная чувствительность. При выборе ПМП особое внимание должно уделяться изучению их ориентационных характеристик (см. главу 2). Таблица 6.3. Основные параметры наиболее распространенных преобразователей магнитного поля, используемых для регистрации магнитного поля Земли
|
|||||||||||||||||||||||||||||||||||||||||||||||















