
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 [ 91 ] 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 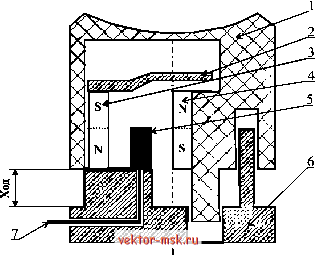 Рис. 6.13. Конструкция бесконтактного клавишного модуля с беспружинным возвратом, выполненная с использованием магнитоуправляемой микросхемы: 1 - головка модуля; 2 -полюсной наконечник; 3 - подвижный постоянный магнит; 4 - неподвижный постоянный магнит; 5 - магнитоуправляемая интегральная схема; 6 -основание-корпус модуля; 7 - выводы микросхемы В такой конструкщш (рис. 6.13) применяется магнитоуправляемая микросхема с инверсной характеристикой переключения, которая при отсутствии магнитного поля соответствует положению включено , а при воздействии магнитного поля - положению вьпслючено . Принцип действия такого клавишного модуля достаточно прост. При нажатии на головку модуля 1 подвижный магнит 3 пойдет вниз и встанет напротив зафиксированного магнита 4. Поскольку их полярность противоположна, то результирующее магнитное поле в зазоре будет равно 0. В этот момент происходит срабатьшание микросхемы 7 и ее выходной сигнал будет соответствовать состоянию включено . Если головку модуля отпустить, подвижный магнит 3 оттолкнется от неподвижного магнита 4, головка вернется в исходное положение и микросхема полем неподвижного магнита 4 будет приведена в первоначальное состояние - вьпслючено . Сигнал на выходе МУМ представлен в стандартной форме в виде логического 1 или О и без дребезга, характерного для электромеханических систем. Схема легко согласуется с другими стандартньп*а1 логическими элементами [19]. С расширением использования персональных компьютеров практически во всех отраслях обороны, науки и техники, в производстве и быту самьпи массовьпи потребителем бесконтактных клавишных модулей и блоков становятся производители ПЭВМ и периферийных устройств, так как мировое производство ПК достигло десятков миллионов комплектов в год. Современные клавишные блоки (клавиатуры), применяемые в персональных компьютерах, характеризуются следующими параметрами: количество клавиш......................100-123; рабочий ход...............................3,5-4,2 мм; усилие нажатия...........................50-70 г; напряжение питания....................5В+10%; ток потребления.........................200-50 мА (включая контроллер); ресурс работы...........................(10-50) X 10* циклов. Зарубежньпйи фирмами вьшускается широкая номенклатура клавиатур, в том числе и устройства на магнитоуправляемых микросхемах. В табл. 6.2 приведен перечень наиболее применяемых видов клавиатур для ПЭВМ и даны средние цены на них. Несмотря на относительно высокие цены, фирма Honeywell (США) продолжает использовать магнитоуправляемые микросхемы в своих изделиях. Специалистами фирмы разработаны для этих целей два типа (2SSP, 2SSP-6) малогабаритных высокочувствительных схем с индукцией срабатьтания/отпускания 1,5/ 1,1 мТли/4мТл. Клавишные модули, реализованные с применением МУМ Первые электронные кнопки с применением элементов Холла и магнитоуправляемых интегральных микросхем были изготовлены фирмами Nucleonic Product и Honeywell в начале 80-х годов. В настоящее время подавляющее больппшство современных магнитоэлектронных клавиппп.1х модулей и клавиатур для ПЭВМ вьшолняется с применением кремниевых магнитоуправляемых интегральных микросхем [10, 28, 37]. На рис. 6.13 приведен вариант конструкщш бесконтактного клавишного модуля с беспружинньпи возвратом, реализованный с использованием магнитоуправляемой микросхемы. Таблица 6.2. Перечень наиболее применяемых видов клавиатур для ПЭВМ и средние цены на них
Фирма Allegro специально для портативной клавиатуры разработала магнитоуправляемые интегральные микросхемы серии А3210. Эти схемы рассчитаны на напряжение питания 2,5-3,3 В при токе потребления менее 1 мА. При изготовлении микросхем применяются эпипланарная и КМОП технологии [54]. На основе новых МУМ фирма Honeywell вьшускает унифицированные клавишные модули (Keyswitch Modules) серии SD16. Модули вьшускаются в двух модификациях: трехвьшодные (Three-Terminal SD Module) и четьфехвьшодные (Four-Terminal SD Module). С использованием модулей SD16 фирма Honeywell вьшускает несколько серий специализированных клавиатур, в том числе: 63 SD30-4 (Microcomputer-based Keyboard), 26SD1 -2 (Point-of-Sale Keyboard) и 12SD/16SD (Numeric Keyboards) [70]. Основные технические характеристики клавишных модулей серии SD16 приводятся в главе 21. Дальнейшее развитие рьшка магнитоэлектронных бесконтактных клавишных модулей и блоков клавиатур сдерживается сравнительно высокой стоимостью МУМ и значительным (2-5 мА) током потребления микросхем в режиме ожидания. При наличии на одной панели до 123 клавиш указанные недостатки во многих случаях являются определяюпщми конкурентоспособность изделий. Одновременно с разработкой специальных микромощных МУМ и миниатюрных достаточно мощных постоянных магнитов продолжаются поиски и новых конструктивных решений, позволяющих снизить трудоемкость и стоимость изготовления самих клавиатур. На рис. 6.14 в упрощенном виде изображен один из таких вариантов. Головка модуля Подвижный магнит Панель Печатная плата  Магнитоуправляемая интегральная схема Постоянный магнит Рис. 6.14. Возможный вариант конструкции группового клавишного блока В данной конструкции все магнитоуправляемые ИС блока размещаются на одной печатной плате вместе с контроллером клавиатуры. Под каждой микросхемой располагаются микромагниты. Подвижная часть клавиатуры представляет собой блок клавишных головок, размещенных на общей панели и тоже снабженных миниатюрными постоянными магнитами. Магниты на головке модуля и под микросхемой повернуты друг к другу одноименными полюсами, что позволяет использовать их в качестве возвратного механизма. Совершенствование технологии изготовления МУМ с переходом на КНИ и КМОП процессы дает возможность снизить потребляемый ток до 0,1-0,25 мА в режиме ожидания при одновременном снижении стоимости микросхем до 10-15 центов за штуку, что способствует расширению сферы применения этих устройств. 6.3. Бесконтактные неременные резисторы Особую группу магнитоэлектронных устройств представляют бесконтактные переменные резисторы (БПР).Эта группа электронных элементов с регулируемьпи сопротивлением по своему функциональному назначению примьпсает к классу переменных резисторов - элементов современной электронной техники, предназначенных для регулировки напряжения и тока в электрических цепях. Основньпй и принциниальньпй отличием БПР от других типов переменных резисторов является отсутствие подвижного контакта, перемещением которого по поверхности резистивного слоя обычно регулируется сопротивление или выходное напряжение данного устройства. В зависимости от схемы включения БПР часто называют бесконтакгньпии потенциометрами (Non-contact Potentiometer). Магнитоэлектронные БПР - это электронные компоненты, у которых регулирование сопротивления или выходного напряжения достигается воздействием на МЧЭ магнитного потока. В общем виде магнитоэлектронный БПР представляет собой устройство, состоящее из магниточувствительного элемента и связанного с ним источника управляющего магнитного поля. В необходимых случаях в конструкцию прибора встраивается электронная схема усиления и предварительной обработки сигнала. Магнитоэлектронные переменные резисторы относятся к группе позиционных регуляторов, когда электрический режим управляющей цепи в процессе регулирования сопротивления остается неизменньпи, а интенсивность управляющего воздействия на магниточувствительный элемент изменяется путем изменения расположения МЧЭ относительно источника этого воздействия или промежуточных регулирующих элементов конструкции. При этом вращательное или поступательное движение подвижной системы БПР сопровождается изменением по определенному закону сопротивления МЧЭ или выходного напряжения. Магнитоэлектронные переменные резисторы и потенциометры используются вместо традиционных переменных резисторов с подвижньпи контактом при необходимости обеспечения высокой разрешающей способности, малых шумов регулирования, высокой износоустойчивости и надежности. агниторезистор 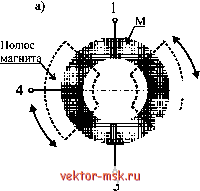 р / Полюс у магнита
Рис. 6.15. Магнитоэлектронный потенциометр, реализованный с применением магниторезисторного моста: а -устройство; б - выходная характеристика: 1,3- выводы входа; 2,4- выводы выхода потенциометра: ij - коэффициент деления потенциометра) Принцип действия магнитоэлектронного потенциометра простейшей конструкции проиллюстрирован на рис. 6.15.а. В качестве управляемого элемента используется кольцевой магниторезистор с четьфьмя сегментами, включенньпйи в схему моста. Управляющее магнитное поле формируется специальным двухполюсным магнитом, жестко связанным с осью переменного резистора. При вращении магнита функциональная характеристика прибора может иметь вид, приведенный на рис. 6.15.6 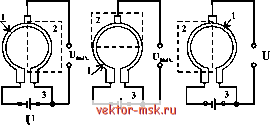 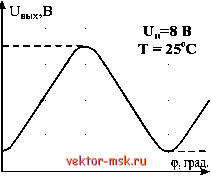 1 - дифференциаольный магниторезистор;ъ 2 - постоянный магнит; 3-источник питания. 90 180 270 360 Рис. 6.16. Бесконтактный переменный резистор, выпускаемый фирмой Murata: а -устройство: б - выходная характеристика: 1 - дифференциальный магниторезистор; 2 - постоянный магнит; 3 - источник питания |















