
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 [ 86 ] 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 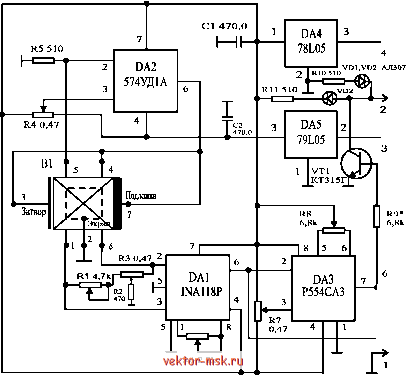 +Un(7...9B) Выход 3 -Un(7...9B) h Выход 2 Выход 1 Общий Рис. 5.167. Электрическая схема блока предварительного усиления и обработки сигнала датчика точного В качестве магнитных датчиков точного 1 и предельного 2 уровня использованы два полевых элемента Холла (ПДХ типа FEHS-Ol). В качестве управляющего элемента применяется постоянный магнит из сплава самарий-кобальт (0 10 мм, L = 6 мм, В > 100 мТл), вклеенный в пенопластовый поплавок (0 20 мм, L = 25 мм), который погружен в водомерную трубку контролируемого объекта. Принщш работы системы (рис. 5.166) достаточно прост. Сигнал датчика точного уровня усиливается и обрабатывается блоком, электрическая схема которого приведена на рис. 5.167. В качестве усилителя сигнала ПДХ (В 1) используется интегральная схема инструментального усилителя типа IN А-118Р (DA1). Операщюнный усилитель DA2 применяется в качестве источника тока для питания элемента В1. Интегральные схемы DA4 и DA5 используются как стабилизаторы напряжения питания блока. Блок питается от выпрямителя, расположенного в блоке линейного индикатора (рис. 5.168). Общий > Ч-Щ f-1 аналоговый СЗ Кде12Ах4 5,0 X 300 - 7...9В 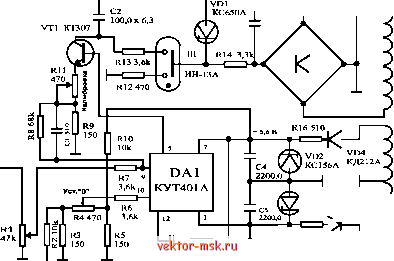 С6 510 R15 560 + 7...9В I vr)3 I КС 156А VD5 , КД212А -5,6 В R17 510 Рис. 5.168. Электрическая схема блока линейного индикатора и питания магнитный 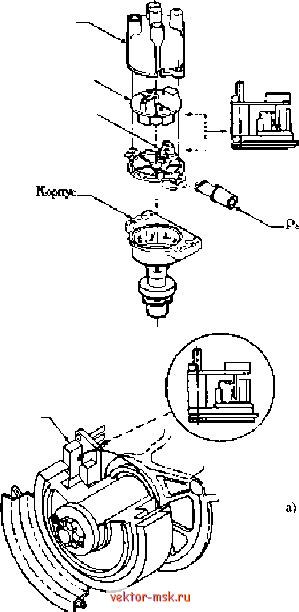 Рис. 5.169. Использование щелевого магнитного датчика в системе электронного зажигания Аналоговый магнитный датчик магнктнын 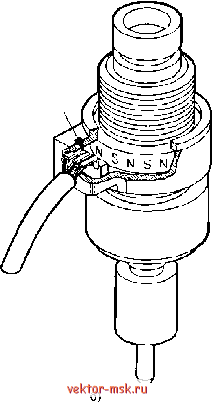 Рис. 5.170. Использование в системах измерения скорости вращения и угла поворота магнитных датчиков: а -щелевого; б - аналогового Усиленный элемента Холла В1 поступает в аналоговой форме на выход (выход 1) и на компаратор DA3. При всплытии поплавка с магнитом вьппе установленного уровня на выходе компаратора вьфабатывается сигнал, открывающий выходной транзистор VT1. В результате на выходе 3 появляется сигнал, поступающий на исполнительное устройство и вьпслючающий насос подкачки жидкости. Датчик предельного уровня 2 служит для предупреждения перелива. Он имеет свою схему усиления и обработки сигнала 3. При достижении поплавком уровня датчика 2 происходит срабатывание исполнительного механизма, вьпслючающего насос или, в случае необходимости, включающего клапан слива (на рис. 5.165 не показан). Аналоговый сигнал с выхода 3 (рис. 5.167) поступает на вход блока линейного индикатора (рис. 5.168). Блок линейного индикатора (рис. 5.168) работает следующим образом. Аналоговый сигнал поступает через потенщюметр R1 на вход операщюнного усилителя DA1, а с него на базу транзистора VT1, управляющего индикатором П1. В качестве П1 используется газоразрядный линейный индикатор типа ИП-13А. Чувствительность блока линейного индикатора составляет 1 мм (перемещения поплавка) на всю ппсалу (> 100 мм). Точность срабатывания датчика точного уровня составляет ±0,1 мм. 5.10.2. Примеры использования МД в автомобильной технике и промышленном оборудовании Ниже без объяснений приводятся примеры использования магнитных датчиков. Применение МД в автомобильной технике 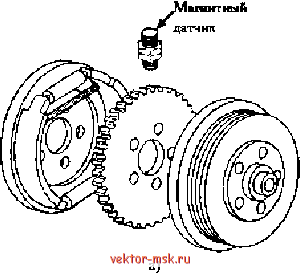 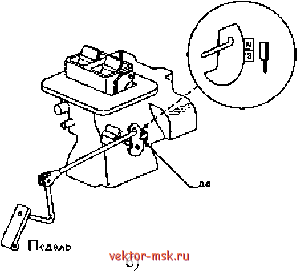 нагнитнык пик Рис. 5.171. Использование магнитных датчиков в системах: а - предупреждения заносов; б - определения положения педали газа Применение МД в других областях техники Длскг 3 Buji 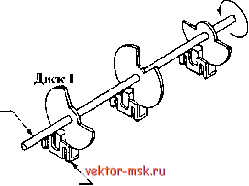 Мнп1Ш1Ск1шсныс .vi:ii нигы Дц] чнк 3 дд1чик 3 LUciBuJi ДЦ1чик 2  Ддп чик 2 ДД1чик I Рис. 5.172. Использование в многоразрядных системах определения угла поворота и скорости вращения магнитных датчиков: а - щелевых, б - торцевых  Рис. 5.173. Совместное использование магнитных датчиков в системах определения угла поворота и скорости вращения |















