
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 [ 80 ] 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Стабилизатор напряжения -►I Дифферен-J циальный усилитель Триггер Шмитта VDlA Выход Общий Рис. 5.122. Функциональная схема магнитоуправляемой ИС с мощным составным транзистором на выходе, предназначенной для непосредственного управления обмоткой вентильного электродвигателя Стабилизатор напряжения т Дифферен Щ1альный усилитель Тригге! Шмитта 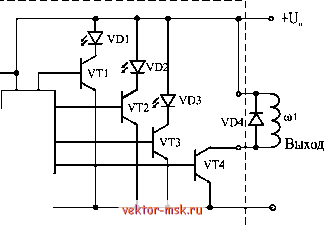 Схема контроля скорости Общий Рис. 5.123. функциональная схема магнитоуправляемой ИС с мощным транзистором на выходе, предназначенной для непосредственного управления обмоткой вентильного электродвигателя г------------------------------------ Стабилизатор напряжения -►I Дифферен -1 Щ1альный усилитель Триггер Шмитта Схема контроля скорости Вых.контроль Выход о Общий Рис. 5.124. Функциональная схема магнитоуправляемой ИС с тиристором на выходе, предназначенной для непосредственного управления обмоткой вентильного электродвигателя В настоящее время рядом зарубежных фирм выпускаются магнитоуправляемые интегральные схемы, предназначенные для непосредственного управления обмотками двухфазных бесколлекторных электродвигателей. Характерными представителями данного вида приборов являются интегральные микросхемы серий UDN 3625 и UGN5275, вьшускаемые фирмами Sprague и Allegro. 5.8.3. Интегральные датчики положения ротора Наиболее совершенными являются интегральные датчики положения ротора, вьшолненные в виде специализированных ИС, содержащих преобразователи магнитного поля и схемы непосредственного управления обмотками ЭД, объединенные в одном корпусе. Функциональные схемы таких ИС без подробных объяснений приводятся на рис. 5.122...5.124. Каждая из схем позволяет управлять только одной обмоткой электродвигателя. Следовательно, при проектировании двигателя количество ИС должно соответствовать количеству обмоток. +Uii Магнитоуправляемые микросхемы типа UDN 3625 и UDN 3626 Мощные МУМ тина UDN3625 и UDN3626 с током коммутации до 1,3А предназначены для непосредственного управления обмотками бесколлекторных электродвигателей постоянного тока. Упрощенная структурная схема МУМ с подключенньп*а1 обмотками ЭД приведена на рис. 5.125. I UDN3625, Старт/стоп <1> I I I I I I L I (Стабилшатор! напряжения Г Дифференциальный усилитель Триггер Шмитгг Схема управленш Инвертор К тахометру Выход А VD6 V VD7 col © Выход в TvD4 VD5 Рис. 5.125. Упрощенная функциональная схема МУМ типа UDN3625 UDN3626). Диоды VD1...VD6 используются при больших токах коммутации Функциональная схема (рис. 5.125) не требует особых пояснений. Особенностью схемы является наличие двух специальных выводов: вывода 1 для управления ЭД в режиме старт/стоп или аналогового управления скоростью вращения (при включении в замкнутую систему управления), а также вывода 8 для подключения тахометра. В качестве источника управляющего магнитного поля используется ротор электродвигателя, вьшолненный в виде многополюсного магнита. Элемент Холла МУМ вьшолняет роль датчика положения ротора. Схема работает следующим образом. Один из выходов (А) открьшается при воздействии на ЭХ магнитного поля положительной полярности ( южный полюс магнита), другой (В) - открывается при воздействии магнитного поля отрицательной полярности ( северный полюс магнита). Когда магниточувствительный элемент МУМ находится в области магнитного поля положительной полярности и при В > В^р^, то на выходе А устанавливается уровень лог. 1 , а на выходе В - уровень лог. О . Если магниточувствительный элемент МУМ находится в области магнитного поля отрицательной полярности и при В > В^р^ , то на выходе В устанавливается уровень лог. 1 ,а на выходе А - уровень лог. О . Характеристика переключения МУМ приведена на рис. 5.126. Микросхемы UDN3625 и UDN3626 отличаются только величиной рабочего напряжения тока коммутации. Основные параметры МУМ приведены в таблице 5.28. [43] Таблица 5.28.0сновные параметры МУМ типа UDN 3625 (UDN 3626) Вых.А 0Т1 Вых.В 0 П Рис. 5.126. Характеристика переключения МУМ типа UDN3625(UDN3626)
Магнитоуправляемые микросхемы типа UGN5275 Магнитоуправляемые интегральные схемы UGN5275 предназначены для непосредственного управления обмотками бесколлекторных двигателей постоянного тока. Упрощенная функциональная схема МУМ приведена на рис. 5.127. UGN5275 Стабилизатор напряжения 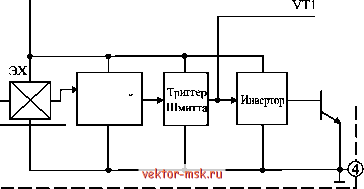 Дифферен- Щ1альныи J* усилитель -Ф+Un /--() Выход 1 1 Выход 2 I (Инверсный) Общий Рис. 5.127. Упрощенная функциональная схема МУМ типа UGN5275 Функциональная схема (рис. 5.127) не требует особых пояснений. Для стабилизации рабочих точек переключения прибор снабжен схемой термостабилизации. В качестве источника управляющего магнитного поля используется ротор электродвигателя, вьшолненный в виде многополюсного магнита. Элемент Холла МУМ вьшолняет роль датчика положения ротора. Схема работает следующим образом. Один из выходов (Q1) открьшается при воздействии на ЭХ магнитного поля положительной полярности ( южный полюс магнита), другой (Q2) - открьшается при воздействии магнитного поля отрицательной полярности ( северный полюс магнита). Когда магниточувствительный элемент МУМ находится в области магнитного поля положительной полярности при В > Вррд, то на выходе (1) устанавливается уровень лоп 1 , а выход Q2 остается в неизменном состоянии. При В < выходе (1) устанавливается уровень лоп О , а выход (2), по-прежнему, остается в неизменном состоянии. Аналогичным образом функционирует выход 2, но при воздействии магнитного поля отрицательной полярности. Характеристика переключения МУМ приведена на рис. 5.128. Основные параметры микросхем типа UGN5275 приведены в таблице 5.29. [31]
-20 -10 О 10 20 В,мТл
-20 -10 о В,мТл Рис. 5.128. Характеристика переключения МУМ типа UGN5275 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















