
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 [ 78 ] 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Кроме того, в последние годы все большее распространение получают индукторные (бесколлекторные) двигатели переменного тока, принцип действия которых аналогичен ВЭД. Скорость вращения таких электродвигателей может устанавливаться в широких пределах: от единиц до нескольких тысяч оборотов в минуту. 5.8.1. Принцип работы бесколлекторпого электродвигателя постоянного тока Конструкция современного вентильного двигателя очень близка к конструкции двигателя неременного тока, известной иод названием синхронного двигателя с постоянными магнитами. Обмотки якоря являются частью статора, а ротор состоит из одного или нескольких постоянных магнитов. Обмотки вентильного двигателя выполняются такими же, как и обмотки многофазного двигателя переменного тока. При помопщ специальной схемы управления в обмотках двигателя создается вращающееся магнитное поле, которое и приводит во вращение ротор электродвигателя. Надежный запуск двигателя должен происходить при любом исходном положении ротора. Вентильные двигатели постоянного тока отличаются от синхронных двигателей переменного тока тем, что первые содержат некоторые технические средства определения положения ротора (или магнитных полюсов) с целью выработки сигналов управления полупроводниковыми ключами ( заменяющими коллектор). Положение ротора определяется специальным датчиком (ДПР), наибольшее распространение в качестве которых получили дискретные элементы Холла и магнитоуправляемые ИС на их основе. Принцип определения положения ротора при помощи элемента Холла На рис. 5.114 в виде четырехполюсника показана эквивалентная схема элемента Холла, использованного в качестве датчика угла поворота. 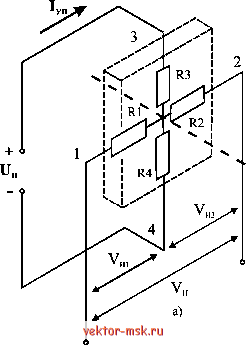 X В 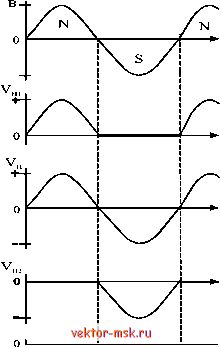 п 2п Положение ротора Рис. 5.114. Элемент Холла, как датчик положения ротора: а - эквивалентная схема; б - эпюры напряжений на выходе Схема (рис. 5.114) работает следующим образом. При протекании тока управления I от вывода 3 к выводу 4 элемента Холла, помещенного в магнитное поле, вектор индукции которого перпендикулярен hhiScocth элемента, на выводах 1 и 2 элемента возникает эдс-Холла . Если предположить, что R1 = R2 и R3 = R4 и принять вывод 4 за общую точку схемы, то потенциалы выводов 1 и 2 будут соответственно равны Vjj / 2 и - Vjj / 2. Далее при изменении направления магнитного поля меняется полярность наводимого на элементе напряжения, что показано на рис. 5.114.6. Поэтому если разместить элемент Холла вблизи ротора с постоянным магнитом, то этот элемент достаточно точно выявляет положение полюсов и значение магнитной индукции, генерируя выходные напряжения , и V На рис. 5.115 приведены схема и устройство простейшего бесколлекторного двухфазного двигателя постоянного тока, построенного с применением элемента Холла в качестве датчика положения ротора. Ротором электродвигателя служит двухполюсный магнит. Для бытовой радиоэлектронной аппаратуры наибольшее распространение получили вентильные электродвигатели со следующими основными характеристиками: рабочее напряжение от 3 до 24В: мощность на валу от 0,1 до 5Вт; скорость вращения от 300 до 6000 оборотов в минуту. 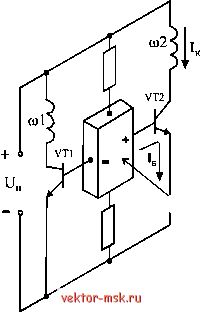 . Элемент \Холла 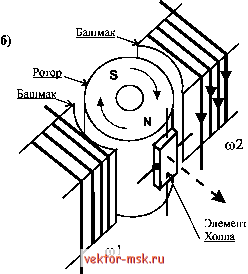 Рис. 5.115. Простейший бесколлекторный электродвигатель постоянного тока: а - принципиальная схема; б - конструкция Для управления обмотками col и (в2 выходные сигналы с элемента Холла поступают на базу транзисторов VT1 и VT2. При этом рассмотрим три основных положения ротора, показанных нарис. 5.116:  !леменг5&лла чЭлемент Уллла Элемент л. 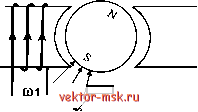 а) б) -- . .. Рис. 5.116. Создание электромагнитного момента и коммутация обмоток бесколлекторного ЭДпри трех основных положениях ротора а - элемент Холла определяет северный полюс постоянного магнита N ротора и подключает обмотку (в2 таким образом, что на полюсном башмаке обмотки образуется южный полюс, вызываюпрш враш:ение ротора против часовой стрелки (рис. 5.116а); б - элемент Холла выходит из-под действия магнитного поля, что приводит к запиранию обоих транзисторов VT1,VT2 и обесточиванию обмоток col и со2. Ротор продолжает по инерции враш:атъся против часовой стрелки (рис. 5.1166); в - элемент Холла определяет южный полюс S ротора и подключает обмотку col таким образом, что на полюсном башмаке обмотки образуется южный полюс, притягиваюпрш северный полюс S ротора, продолжая враш:ение ротора прошв часовой стрелки (рис. 5.116в). Двухфазный двигатель с применением одного элемента Холла и двух обмоток является самым простым и, следовательно, самым дешевым типом ВЭД. Однако такой электродвигатель имеет следуюпще недостатки: наличие двух мертвых точек , при которых элемент Холла не может определить направление магнитного поля, а значит, в обмотках не протекают токи, создающие электромагнитный момент. Следовательно, если двигатель имеет фрикционную нагрузку, то существует вероятность остановки его ротора в мертвой точке . При этом отсутствует возможность запуска двигателя; при малом значении момента трения ротор может пройти по инерции мертвую точку ; при малом значении электромагнитного момента мала и противо-ЭДС, что вызывает увеличение тока и значительные потери в обмотках. Поэтому падает КПД двигателя, являющийся отношением выходной механической мощности к потребляемой электрической мощности двигателя. Для устранения мертвых точек используются специальные методы. Один из методов связан с использованием многофазной конструкции ВЭД, другой - с использованием пространственного гармонического магнитного поля и т.д. (Подробнее см. [14].) 5.8.2. Конструкции бесколлекторных электродвигателей постоянного тока В настоящее время существует огромное число юнструкций бесюллекторных двигателей постоянного тока различного назначения. На рис. 5.117 в качестве примера приведена наиболее распространенная конструкция двигателя ведущего вала (ДВЕ) видеомагнитофона. Печатная плата Датчик частоты Интегральная схема ] г^=е. драйвера -- 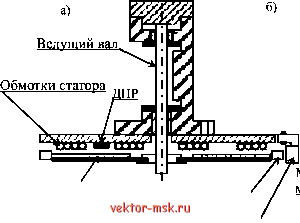 Магнит ротора Многополюсный магнит/ Датчик частоты вращения t 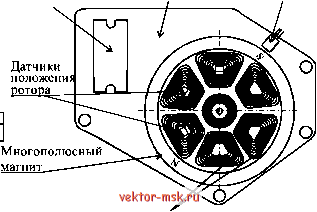 Обмотки статора Рис. 5.117. Бесколлекторный электродвигатель ведущего вала видеомагнитофона: а - конструкция; б- Двигатель ВВ представляет собой плоскую конструкцию ПДПТ с осевым рабочим зазором. Все основные элементы двигателя размещены на печатной плате. К особенностям двигателя можно отнести наличие магнитной системы торцевого типа с магнитным потоком, направленным вдоль оси вращения двигателя, и плоских катушек статора, расположенных между магнитом ротора и ярмом статора (рис. 5.120.6). Вращающий момент в двигателе создается в результате взаимодействия магнитного потока в промежутке между полюсами магнита ротора и основанием статора с проводниками обмотки, по которым протекает электрический ток. Управление коммутацией катушек обмотки статора в зависимости от положения полюсов магнита ротора осуществляется специальной интегр альной схемой (драйвером) по сигналам датчиков положения ротора. Датчики положения ротора (дискретные элементы Холла или магнитоуправляемые ИС) располагаются внутри плоских катушек статора. В зависимости от конструкции двигателя количество ДПР может меняться с 2-х до 3-х и более. (См. рис. 5.117.6) Контроль скорости вращения ротора осуществляется специальным датчиком, состоящим из многополюсного магнита, размещенного на роторе двигателя, и тонкопленочного магниторезистора, укрепленного на печатной плате (рис. 5.117.6) на малом (0,1-0,3 мм) расстоянии от магнита. На практике нашли применение двух- и трехфазные двигатели. В таких двигателях ротор, как правило, имеет 6-8 полюсов. Сам магнит обычно изготавливают из магнитокерамики. Катушки каждой фазы имеют многослойную намотку одним или двумя проводами с числом витков 60-100. Катушки статора после намотки пропитывают лаком, получая практически плоскую монолитную бескаркасную обмотку, и приклеивают к печатной плате, расположенной на основании двигателя. Большое число катушек статора, как и полюсов магнита ротора, способствует равномерности скорости вращения. Однако наиболее распространены ПДПТ с небольшим числом катушек, так как увеличение их количества повышает стоимость конструкции самой катушки, статора и схемы драйвера, а следовательно, и стоимость всего узла. Нарис. 5.118 приведена упрощенная структурная схема бесколлекторного электродвигателя с электронным коммутатором, которая не требует особых пояснений. Основными функциями электронного коммутатора являются следующие: усиление и обработка сигналов, поступающих с ДПР и датчика скорости вращения; коммутация по сигналам ДПР и сигналам управления с выхода системы автоматического регулирования и процессора системного контроля видеомагнитофона токов статора в заданные моменты времени и в заданной последовательности. Вход датчика Выход сигнала Рис. 5.118. Структурная схема трехфазного прямовыводного двигателя постоянного тока: 1,3-магнитоуправляемые ИС; 4 -усилитель сигнала датчика скорости вращения; 5, б, 7 -усилители-формирователи сигналов ДПР; 8 - усилитель сигнала управления от системы автоматического регулирования; 9- электронный коммутатор; 10, 11, 12 - выходные усилители мощности скоррости §ращения датчика скорости вращения 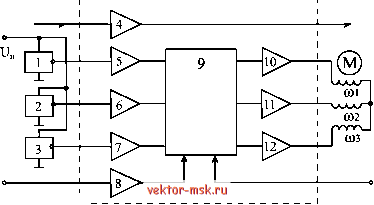 Сигнал САР , |















