
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 [ 70 ] 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 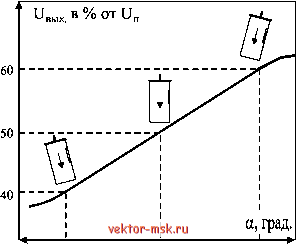 Рис. 5.76. в. Выходная характеристика (в) датчика угла наклона типа PMP-STX -5 О +5 В таблице 5.16 приведены основные параметры магнитного датчика угла наклона типа PMP-S5LX. вьшускаемого фирмой Mirodi America Corp. Таблица 5.16.0сновные параметры магнитного датчика угла наклона типа PMP-S5LX
Малогабаритные датчики угаа наклона обладают высокими эксплуатационными характеристиками. Их высокая точность, миниатюрные размеры, отсутствие подвижных механических узлов, простота крепления на объекте и низкая стоимость делают целесообразным использовать их не только в качестве датчиков крена, но и заменять ими угловые датчики, причем не только на стационарных, но и на подвижных объектах. В качестве основных можно считать следуюпще области применения. 1. Автомобильная техника. Это работа их в системе автонавигации, определения профиля дороги, в системе горизонтирования салона, в системе автомобильного торможения ABS, системах охранной сигнализации. Они могут контролировать положение руля, положение заслонок и штоков, осуществляющих регулировку мощности двигателя и коробки передач, отопление и вентиляцию салона, следить за положением кресел и их спинок и т.п. Определение крена автомобилей, кораблей и подводных роботов, дорожных грейдеров и асфальтоукладчиков, подъемников и кранов, экскаваторов, сельскохозяйственных машин. Долговременное определение положения различных высотных сооружений, плотин, стволов шахт, использование в системах горизонтирования платформ, определение величины прогибов и деформаций различного рода опор и балок. Контроль углов наклона автомобильных и железных дорог при их строительстве, ремонте и эксплуатации. Определение направления бурения нефтяшк и газовых скважин, использование в системах управления насосами нефтяшк скважин. 6. Использование в роботах, станках и печатных прессах для контроля положения механизма, режущего органа или валика на печатных прессах. А также для контроля положения валов, колес, механизмов редукторов, как на стационарных, так и подвижных объектах. 7. Использование в системах охранной сигнализации, (в первую очередь автомобильных), и приборах сейсмоакустического контроля. 4. 5. 5.6. Магнитные датчики для считывания информации с магнитных носителей В связи с заметными успехами в технологии изготовления современных высокочувствительных преобразователей магнитного поля все большее распространение получают магнитоэлектронные устройства, предназначенные для воспроизведения информации, записываемой на специальные носители. К таким носителям относятся: магнитные ленты и магнитные карты, штрих-коды, а также банкноты, помеченные магнитньпйи индикаторами (магнитньп*а1 красками, магнитньпии нитями и т.д.). Принцип действия указанных устройств аналогичен традиционньпи индукционным воспроизводяпщм головкам, иснользуемьпй для воспроизведения магнитной записи звука и др. информации. Воспроизводяш;ая головка преобразует изменение магнитного потока движуш;егося носителя информации в электрический сигнал. [10] Принцип действия индукционной воспроизводяш;ей магнитной головки понятен из рис. 5.77, где приведено и её схематическое изображение. Паправление движения носителя
Рис. 5.77. Схематическое изображение индукционной воспроизводящей головки Обмотка Обмотка
зазор Магнитопровод индукционной воспроизводяш;ей магнитной головки (ВИМГ), как правило, образован двумя симметричньп*а1 полукольцами с обмотками, между которьпии расположены два зазора: рабочий и дополнительный. (Рис. 5.77) В процессе воспроизведения внешний магнитный поток носителя информации (например, магнитной ленты или магнитной карты) замьпсается через сердечник воспроизводяш;ей головки, имеюш;ей малое магнитное сопротивление по сравнению с воздухом, и, пронизьшая обмотку головки индуцирует в ней э.д.с. Эта э.д.с. изменяется пропорционально скорости изменения магнитного потока в носителе информации около рабочего зазора. Таким образом, при воспроизведении головка преобразует энергию движения магнитной фонограммы в электрическую энергию. Основные параметры ВИМГ определяются шириной рабочего зазора, т.е. промежутком между торцами магнитопровода, заполненного диамагнитньпи материалом. Для ВИМГ этот параметр является главным, поскольку он определяет вносимые рабочим зазором (Sp) частотные искажения, зависяш;ие от длины волны. При уменьшении длины волны записи 1 и равной ширине, т.н. эффективного D рабочего зазора, э. д.с. снижается до нуля. В этом случае основная часть магнитного потока от носителя информации замьпсается в рабочем зазоре, не попадая в сердечник головки. (D - эффективная пшрина рабочего зазора которая на 10... 15% превьппает ширину рабочего зазора Sp). Другим основньпи параметром ВИМГ является отдача Е - это э.д.с. индуцируемая в обмотке головки при воспроизведении записи с определенной намагниченностью и частотой воспроизводимого сигнала. Для индукционных головок величина рабочего зазора (Sp) лежит в пределах от 5 до 20 мкм. Отдача (Е) составляет от 0,4 до 6 мВ при воспроизведении измерительной ленты ЛИР 1-38У.[10] Магнитоэлектронные воспроизводящие и считывающие головки Конструкции магнитоэлектронных воспроизводяпщх и считьтаюш;их головок имеют много обш;его с индукционньпии, но вместо обмотки в таких головках используются преобразователи магнитного поля. В качестве измерителя напряженности магнитного поля в рабочем зазоре магнитоэлектронных головок используют ПМП многих известных типов, например, магниторезисторы, элементы Холла, магнитодиоды и т.п. Магнитоэлектронные воспроизводящие головки Принцип действия магнитных головок, реализованных с применением элементов Холла иллюстрируется на рис. 5.78. Рабочий зазог Магнитопровод 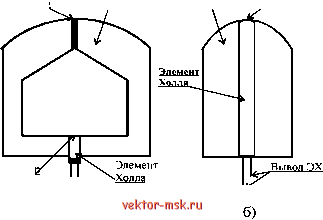 Рабочий зазо Вывод Рис. 5.78. Конструкция звуковоспроизводящих головок, реализованых с применением элементов Холла: а - с ЭХ в дополнительном зазоре; б - с ЭХ в рабочем зазоре Элемент Холла в звуковоспроизводящей головки может размещаться в дополнительном (рис. 5.78.а) или в рабочем зазоре (рис. 5.78.6). Конструктивно наиболее просто реализуется головка с ЭХ в дополнительном зазоре. В этом случае через ЭХ проходит только часть магнитного потока от носителя записи из-за рассеяния и ответвления через рабочий зазор. Поэтому по чувствительности такая головка уступает головке с ЭХ, помещенном в рабочем зазоре. В то же время головка с ЭХ в дополнительном зазоре может быть вьшолнена с более высокой разрешающей способностью, так как её рабочий зазор определяется только толщиной немагнитной прокладки. Во второй конструкщш рабочий зазор определяется толщиной ЭХ, который изготовить по традищюнной технологии тонким довольно трудно. Однако современная технология уже позволяет создавать ЭХ с толщиной порядка 30...50 мкм. Наилучшим материалом сердечника для головок с элементом Холла является феррит. При ферритовом сердечнике отпадает необходимость электрической изолящ1и контактов МЧЭ от сердечника (магнитопровода), поскольку феррит имеет весьма высокое удельное электрическое сопротивление. В головках с металлическим магнитопроводом ЭХ и его контакты изолируются от сердечника тонкой прокладкой. К сожалению, ферритовые сердечники обладают неудовлетворительными механическими свойствами, затрудняющими изготовление головок с хорошим качеством рабочего зазора. Частотная характеристика головок с ЭХ в области высоких частот зависит от тех же факторов, которые определяют характеристику индукционной воспроизводящей головки. Характеристика ЭДС самого ЭХ практически равномерна до частот порядка нескольких МГц. Наибольший интерес представляет использование таких головок для воспроизведения низких частот, практически от О Гц. Отдача головок с ЭХ на основе InSb составляет примерно 0,8 мВ, но их параметры существенно зависят от температуры. (АЕ составляет примерно 2% на 1 °С). Головки с ЭХ на основе InAs имеют отдачу в З...3,5 раза меньше, но она в меньшей степени зависит от температуры (АЕ составляет порядка 0,1 % на °С). На рис. 5.79. приведена схема еще одного варианта воспроизводящей головки, представляющей единое целое с записывающей головкой. В магнитной воспроизводящей головке использован элемент Холла, изготовленный на основе антимонида индия (InSb). Записьтающая Экранирующая головка . пластина Рис. 5.79. Схема варианта воспроизводящей головки, представляющей единое целое с записывающей головкой Элемент Холла 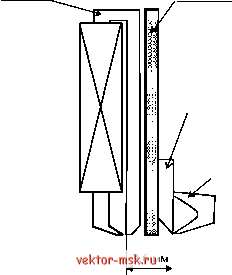 Во спроизводящая . головка Рабочий зазор |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















