
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 [ 69 ] 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 5.4.3. Датчики скорости вращения, использующие вихревые токи При использоюнии преобразоютелей магнитного ноля можно измерять скорость вращения объектов из немагнитных металлов. Метод измерения основан на иснользовании вихревых токов, возникающих в пластинах из электропроводящего материала при движении их в магнитном поле. Возникновение вихревых токов, пропорщюнальных частоте вращения токопроводящей пластины в магнитном поле, вызывает изменение последнего. Это изменение результирующего магнитного поля может, например, измеряться при помощи одного или двух дифференциальных магниторезисторов и преобразовываться в электрический сигнал, пропорциональный частоте вращения (или скорости линейного перемещения) проводящей пластины. На рис. 5.73.а показана механическая часть измерителя, в котором реализован указанный вьппе метод -о +а Магнитопровод 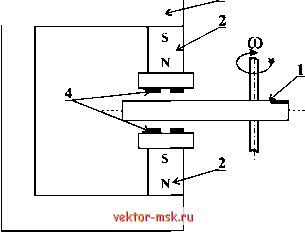 В / R2 Рис. 5.73. Измеритель частоты вращения, использующий вихревые токи: 1 - диск из проводящего материала; 2 - постоянные магниты; 3 - магнитопровод; 4 - дифференциальные магниторезисторы. Измеритель частоты вращения работает следующим образом. Диск 1 из алюминия или меди вращается в магнитном поле, созданном магнитной системой из постоянных магнитов 2 и магнитопровода 3. Изменение магнитного поля в воздупшом зазоре, вызванное протеканием вихревых токов в диске 1, воспринимается дифференциальньпйи магниторезисторами 4. Последние соединены в неуравновешенную мостовую схему (рис.5.73.б), в диагональ которой включается измерительный прибор V. Как показано в работе [28], при вращении алюминиевого диска диаметром 70 мм с частотой 3000 об/ мин в магнитном поле с индукцией порядка 0,5 Тл сигнал в диагонали моста составляет 160 мВ при напряжении питания (UJ, равном 5 В. Если линейно перемещать в этом поле ту же алюминиевую пластину со скоростью 1 м/с, то напряжение сигнала в диагонали моста составит около 16 мВ. Если частота вращения вала (или скорость линейного перемещения) непостоянна, то дифференцированием выходного электрического сигнала можно определить значение ускорения. На рис. 5.74 приведен еще один вариант датчика скорости вращения диска из немагнитного материала, реализованный с применением тонкопленочного резисторного моста типа KMZ10. [12] Конструкция датчика не требует особых пояснений. Магниторезисторный мост типа KMZ10 используется в типовом режиме (см. гл. 2.2). Датчик измеряет магнитное поле, созданное вихревьп*а1 токами, наведенньп*а1 вращающимся медньпи диском. Чем быстрее вращается диск, тем больше вихревые токи и вьппе выходной сигнал датчика. Основные параметры и характеристики датчиков скорости вращения, вьшускаемых наиболее известньп*а1 производителями, приводятся в главе 16 тома 2.  Материал диска - медь Рис. 5.74. Магнитный датчик скорости вращения медного диска: а - вариант конструкции; б -выходная характеристика Принцип действия магнитных датчиков угла наклона (ДУП) основан на регистрации перемещения свободно висящего или плавающего постоянного магнита относительно приемной поверхности магниточувствительного элемента ПМП. Па рис. 5.75 приведены конструкция и принцип действия простейшего датчика угла наклона.  -Т -- т ... J .. J . I a =-5° a =0 6) Puc. 5.75. Простейший датчик угла наклона: а - конструкция: б - принцип действи: 1-корпус датчика; 2-подвес; 3 - постоянный магнит; 4-магниточувствителъный элемент; 5 -основание корпуса; 6 - демфифирующая жидкость Конструкция датчика состоит из герметичного корпуса 1 на крьппке которого при помощи свободного подвеса 2 укреплен постоянный магнит 3. Под действием сил притяжения Земли магнит занимает строго вертикальное положение. Па основании корпуса 5 расположен магниточувствительный элемент преобразователя магнитного поля, в качестве которого могут использоваться магниторезисторы, элементы Холла, магниточувствительные ИС и т.д. Внутренняя полость корпуса заполнена демпфирующей жидкостью 6, в качестве которой часто используется силиконовое масло. Принцип работы датчика понятен из рис. 5.75.а. При наклоне датчика относительно поверхности Земли происходит перемещение постоянного магнита на угол а относительно приемной поверхности МЧЭ, что приводит к изменению величины индукции магнитного поля, и, следовательно, к изменению (или появлению) сигнала. Па рис. 5.76 в качестве примера приведены электрическая схема и выходная характеристика и габаритные размеры простейшего датчика угла наклона типа PMP-STX. Датчик реализован с использованием дифференциального магниторезистора. 0 20 PMP-STX А  Рис. 5.76. Датчик угла наклона типа PMP-STX: а - внешний вид; б - электрическая схема  Общий 5.5. Магнитные датчики угла наклона Магнитные датчики угла наклона (Inclinometer) с электрическим выходным сигналом, нронорциональным углу наклона датчика, являются сравнительно новыми приборами, доведенньп*а1 до ппфокого промьппленного применения липп. в последние годы. По виду выходного сигнала их можно условно разделить на две группы: аналоговые датчики угла (Analog Inclinometer), сигнал на выходе которого пропорционален углу поворота; и цифровые (Digital Inclinometer), сигнал на выходе таких датчиков вьщается в виде цифрового кода. |















