
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 [ 68 ] 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 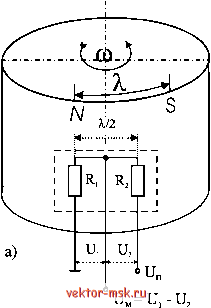 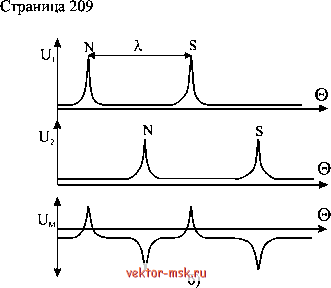 Рис. 5.68. Датчик скорости вращения с применением дифференциального тонкопленочного магниторезистора: а -схематическое устройство; б - эпюры напряжений получаемых на выходе датчика при различных положениях магнита-модулятора На рис. 5.68.6 показаны графики электрических напряжений в различных точках схемы преобразователя, получаемых при вращении многополюсного постоянного магнита (МПМ) с постоянной частотой СО. Магниточувствительные элементы Rj и устанавливаются один относительно другого на расстоянии, равном X12, т.е. равном половине расстояния между полюсами магнита. При вращении магнита сопротивление МЧЭ увеличивается до максимальных значений при установлении против них соответствующих магнитных элементов МПМ (с ближайшими к ним полюсами N или S). Выходное напряжение полумоста, равное = Uj - U поступает на электронную схему, на выходе которой формируются стандартные импульсы прямоугольной формы. В таблице 5.14 в качестве примера приведены параметры двух аналогичных датчика скорости вращения, вьшолненных с использованием тонкопленочных дифференциальных магниторезисторов. На рис. 5.69 приведен его внешний вид и габаритные размеры отечественного датчика типа Ав-1. Следует отметить следующее. Так как плотность магнитного потока изменяется по синусоиде, то при использовании аналогичного линейного датчика можно использовать его в качестве датчика угла поворота. При этом можно различать также и углы, меньшие угла, ограниченного парой полюсов. Таблица 5.14. Основные параметры датчиков скорости вращения, выполненных с использованием тонкопленочных дифференциальных магниторезисторов
3,0 max Активная зона 33 щ^х
,0.14 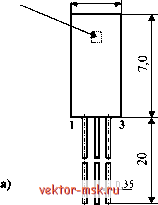 MR1 MR2 выход -(з) Общий Рмс. 5.69. Датчик скорости вращения типа Ав-1: а - внешний вид; б - электрическая схема В работе [3] производилось сравпепие преобразователей па основе тонкоплёночных магниторезисторов с другими импульсньпйи преобразователями частоты вращения, наиболее пшроко применяемьп*а1 в технике. В их число входили: фотоэлектрический, ёмкостной, индукщюнный преобразователи, также МЧЭ на основе элемента Холла и язычковый механический преобразователь (геркон). Преобразователи сравнивались по следующим показателям: разрешающая способность (определяемая максимальньпй числом входных импульсов за один оборот рабочей оси); возможность измерения низких частот вращения; стойкость к воздействию внешних механических и климатических факторов; диапазон рабочих температур и стоимость. По результатам исследований бьшо доказано, что по совокупности всех приведенных показателей, преобразователь с применением тонкопленочного магниторезистора превосходит остальные типы ПМП. Датчики счета полюсов ПМ с применепием магнитоуправляемых ИС Для измерения скорости вращения валов в различных устройствах общего применения наиболее пшроко используют магнитные датчики, реализованные на основе магнитоуправляемых интегральных схем или сами МУМ (см. гл. 3). Такие датчики генерируют на выходе стандартный щ1фровой сигнал и хорошо совмещаются с ТТЛ, КМОП и другими логическими схемами. Эти датчики, как правило, не содержат постоянных магнитов. Принщш работы датчиков иллюстрируется на рис.5.70. Магнитоуправляемая микросхема 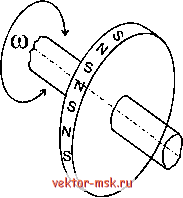 Магнитный датчик скорости вращения 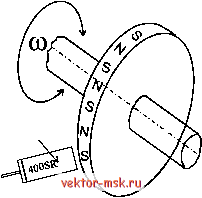 Рис. 5.70. Принцип работы датчиков скорости вращения многополюсных магнитов: а-с использованием МУМ; б-с применением датчика типа 400SR На рис. 5.71 приведен внепший вид датчика 413SR10, а в таблице 5.15 приведены его основные параметры. Рис. 5.71. Внешний вид датчика типа 413SR10 (Фирма Honeywell) В 413SR10
Таблица 5.15. Основные параметры датчика скорости вращения многополюсного магнита типа 413SR10
При использовании датчиков серии 400SR можно измерять не только скорость вращения, но одновременно и угол поворота вала. На рис. 5.72 схематически изображена конструкция такого магнитоэлектронного устройства. Информация о скорости вращения Рис. 5.72. Пример построения цифрового датчика скорости вращения и преобразователя типа вал-код ( вал-цифра ) с применением датчиков серии 400SR 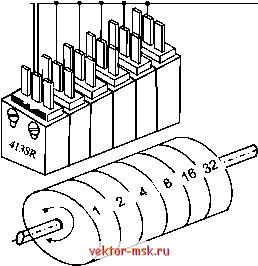 Информация об угле поворота Младший разряд  Выход Старший разряд Устройство состоит из набора магнитных датчиков 400SR фирмы Honeywell и 6-ти разрядного кодового магнитного барабана, установленного на валу контролируемого электродвигателя. Барабан представляет собой набор из 6-ти кольцевых магнитов. В зависимости от разряда на рабочей поверхности кольца может быть сформировано от одной до 32 пар N-S полюсов. Каждая пара полюсов приводит в действие отдельный магнитный датчик, который регистрирует перемещение полюса импульсным сигналом. За один полный оборот барабана (360°), каждый из датчиков вьщает соответственно 1, 2, 4, 8, 16 или 32 импульса. Суммарный сигнал с выхода 6-ти датчиков представляет собой информацию об угле поворота, представленную в двоичном коде. Эта информация поступает на дешифратор и используется по назначению. Информация о скорости вращения вала может сниматься с датчика старшего разряда. Угловое разрешение устройства составляет 5,6° при погрешности определения угла порядка 2%. В качестве кодового барабана могут использоваться и специальные диски с нанесённым магнитным рисунком, представляющим специальные коды. (Например, нормальный код, код Грея, коды с переменным весом разряда и др.). [1, 5, 37] Магнитные датчики скорости вращения отличаются высоким быстродействием, не боятся ни грязи, ни влаги и, в отличие от индуктивных датчиков, дают сигнал прямоугольной формы, не зависящий от числа оборотов ни по форме, ни по амплитуде, ни по фазе. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















