
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [ 65 ] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 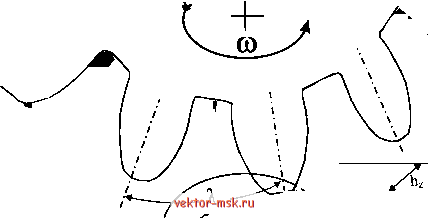 hg- длина МЧЭ Ьг - пшрина зубца. .-расстояние между центрами зубьев  Рис. 5.53. Схема, поясняющая принцип работы магнитного датчика с использованием монолитного ds - расстояние между МЧЭ ~ Ш дифференциального магниторезистора FP210L 100-2 Рис.5. 54 Внешний вид и габариты датчика типа FP210L 100-2 , реализованного с использованием дифференциального монолитного магниторезистора В 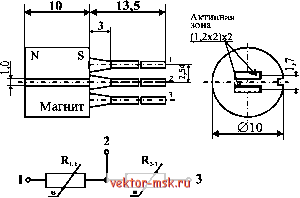 Таблица 5.9.Основные параметры монолитного магниторезистора типа FP210L 100-2
На рис. 5.55.а приведён один из вариантов использования монолитного магниторезистора типа FP210L 100-2 в качестве датчика скорости вращения зубчатых колес, рекомендованный изготовителем МД - фирмой Siemens. Нри использовании магниторезисторов, их включают в полумост или мост. Нри включении в полумост на магниторезистор (R1+R2) подается напряжение питания Un=5B. С выводов 2 и 3 датчика снимается аналоговый сигнал, который зависит от зазора 5 между зубчатъпи колесом и магниточувствительньпи элементом датчика. Зависимость напряжения сигнала датчика Ugjjjor величины рабочего зазора 5 приведена в таблице. 5.10. 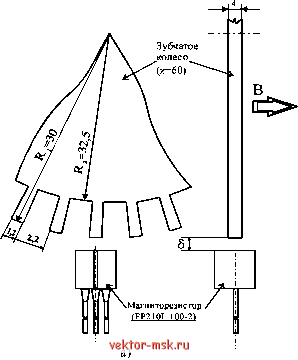 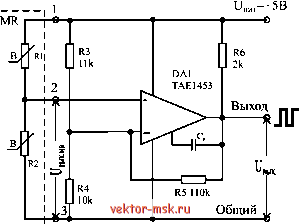 MR - дифференциальный монолитный магниторезистор типаРР210Ь 100-2 DA1 - операционный усилитель ТАЕ 1453 R3xR4 200 Где М - коэффициент симметрии магниторезистора (М=7%) Рж. 5.55. Варшнт применения монолитного магниторезистора в качестве датчика скорости вращения зубчатого колеса: а - схема размещения; б - электрическая схема преобразования аналогового сигнала датчика в цифровой Таблица 5.10. Зависимость аналогового сигнала на выходе датчика от величины рабочего зазора
Нри необходимости преобразования аналогового сигнала в цифровую форму может быть использована схема, приведенная на рис. 5.55.6. Частота (f) вращения (шестерни или вала и т.п.) определяется по формуле: (zx п) 60 (5.15) где п - число оборотов шестерни, об/мин; Z - количество зубьев. Сигнал на выходе моста зависит от величины рабочего зазора и от расстояния между зубцами шестерни. На рис. 5.56. приведены характерные зависимости сигнала на выходе монолитных магниторезисторов серий FP и KSY от расстояния между центрами зубьев ферромагнитной шестерни. Магниторезисторы вьшускаются фирмой Siemens специально для использования их в качестве датчиков скорости вращения зубчатых колес. [49, 50] О
о 12 345 67 Расстояние между центрами зубьев Рис. 5.56. Зависимость сигнала магниторезисторных датчиков от расстояния между центрами зубьев ферромагнитной шестерни Основные параметры некоторых типов датчиков скорости вращения зубчатых колес, вьшускаемых ведущими зарубежньпйи производителями с использованием магниторезисторов, приводятся в гааве 16 тома 2. Датчики счета зубьев с применением элементов Холла и МУМ Достаточно широкое распространение получили датчики скорости вращения зубчатых колес, использующие в качестве ПМП дискретные элементы Холла и магнитоуправляемые интегральные схемы. Па рис. 5.57 в качестве приведена электрическая схема такого датчика. Схема не требует особых пояснений. 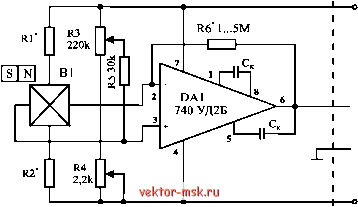 +Un(10...15)B о Выход о Общий -Un(10...15)B Bl - элемент Холла типа ДХК-0,5 или аналогичный Рис. 5.57. Принципиальная электрическая схема датчика скорости вращения зубчатых колес с применением элемента Холла Па рис. 5.58. дана конструкщш и электрическая схема датчика скорости вращения типа 1GT101DC, реализованного на основе магнитоуправляемой ИС. В табл. 5.11 приведены основные параметры этого датчика. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















