
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 [ 62 ] 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 § 1 о Щелевой магнитный датчик В DD1 1 DD2 L482 -L(5>------- К Источник опорного напряжения Vec,=+10...18B -Ф-®---@-------- Схема контроля скважности Схема контроля сигнала управления Схема защиты по напряжению импульса ОХ Схема управления задержкой Формирователь импульса защиты Схема временной защиты
---d)----ф----Д---- R12 R13 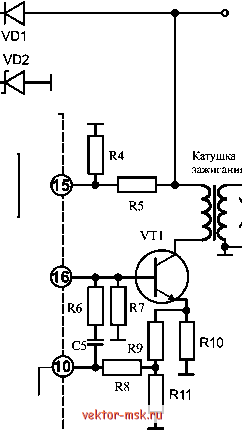 Полюс магнита 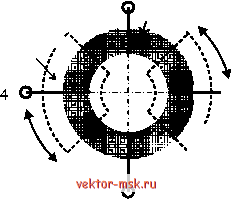 Магниторезистор J Полюс /\ магнита
Рис. 5.41. Кольцевой магниторезистор: а - внешний вид; б - функциональная характеристика: 1,3 - выводы входа; 2,4 - выводы выхода Датчик подобной конструкции работает в диапазоне углов до + 30 при достаточно хорошей линейности выходной характеристики. В работе [16] приведена конструкция датчика угла поворота в котором используется матрица магниторезисторов. Па рис. 5.42 приведен вариант конструкции такого датчика. 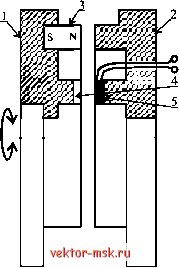 Рис. 5.42. Вариант конструкции датчика угла поворота в котором используется матрица магниторезисторов: 1,2 - кольцевые магнитопроводы; 3 -кольцевой постоянный магнит; 4- зубцы; 5 -магниторезисторная матрица 5.3. Магнитные датчики угла поворота Магнитные датчики тина угла поворота представляют достаточно большую группу изделий микромагнитоэлектроники. По виду выходного сигнала их можно условно разделить на две группы: аналоговые датчики угла, сигнал на выходе которых пропорционален угау поворота; цифровые, часто назьшаемые преобразователями типа угол-код . Сигнал на выходе таких датчиков вьщается в виде цифрового кода. При этом наибольшее распространение получили двоично-рефлексный или двоично-десятичный рефлексные коды, а также код Грэя (по ГОСТ 12814-74). [5] В качестве аналоговых датчиков угаа поворота широко используются бесконтактные переменные резисторы, описанию работы которых посвящена глава 6.3. 5.3.1. Аналоговые датчики угла поворота Простейшим датчиком угла поворота может служить магниторезистор с кольцевьпи расположением 4-х магниточувствительных элементов, включенных в схему моста, (рис.5.41). Датчик угла поворота содержит два кольцевых магнитопровода 1 и 2, установленных соосно и разделенных зазором. Кольцевые магнитопроводы (1,2) вьшолнены П- образными и установлены торцами друг к другу, на одном из торцов магнитопровода 1 установлен кольцевой постоянный магнит 3, а другой торец вьшолнен зубчатым. Зубцы 4 расположены равномерно по окружности с периодом повторения Т. На торце второго магнитопровода, сопряженного с зубчатым торцом первого магнитопровода, устанавливается магниторезисторная матрица 5. Магнитное поле в датчике создается с помопр>ю кольцевого магнита 3, при этом в рабочем воздушном зазоре, образованном зубцами магнитопровода 1 и магниточувствительными элементами матрицы, устанавливается определенная напряженность магнитного поля. Период изменения напряженности магнитного поля для каждой из групп магниторезисторов в матрице равен периоду Т расположения зубцов магнитопровода 1. Ввиду расположения магниторезисторов в матрице с шагом равным (5/4)Т, и объединения их в четьфе группы, причем объединение магниторезисторов производится через шаг, равный пяти периодам Т, происходит изменение сопротивления каждой группы магниторезисторов по своему закону. В исходном (условно-нулевом) положении магниторезисторы первой группы расположены против соответствующих зубцов магнитопровода 1, а магниторезисторы третьей группы против пазов между зубцами. Магниторезисторы второй и четвертой группы будут располагаться в данном случае на границе между зубцами и пазом. При повороте магнитопровода относительно оси вращения на четверть периода Т расположение маниторезисторов первой, третьей и второй, четвертой групп изменится на противоположное. Выбором соотношения между размерами зубцов магнитопровода 1 и размерами магниторезисторов в матрице можно добиться получения изменения суммарного сопротивления магниторезисторов каждой группы при вращении магнитопровода 1 по следующим законам: RQ.-\- кх со&рхф) R(l-\-kx Ш1рхф) R(\-kxQo рхф) R(l-kx Ш1рхф) (5.11) (5.12) (5.13) (5.14) Где Rg - сопротивление группы магниторезисторов при воздействии среднего магнитного поля; к- коэффициент модуляции магнитного поля; р - число зубцов магнитопровода; ф - угол поворота магнитопровода. Объединив магниторезисторы первой, третьей и второй, четвертой групп, можно получить две дифференциальные пары, с которых можно получить два сигнала, изменяющихся по синусному и косинусному законам. Таким образом, участие в формировании выходных сигналов датчика четьфех групп большого количества магниточувствительных элементов позволяет значительно повысить точность измерения угла поворота, так как в этом случае происходит усреднение различного рода технологических отклонений при изготовлении и юстировке датчика. Наличие дифференциальных пар позволяет компенсировать температурную нестабильность. В результате чего получается магнитомодуляционный синусно-косинусный датчик угла, простой в изготовлении и обладающий повьппенной точностью. В работе [4] приведена конструкция прецизионного датчика угла поворота в котором используется тонкопленочный магниторезисторный мост типа KMZ10. На рис. 5.43 приведен возможный вариант конструкции такого датчика. Магнит С5х1.5 мм Рис. 5.43. Вариант конструкции магнитного датчика угла поворота с использованием магниторезисторного моста типа KMZ10  MoctKMZIO  |















