
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 [ 59 ] 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Датчики приближения на основе МУМ Ведущим мировым производителем магпитпых датчиков перемещения и приближения является фирма Honeywell, которая вьшускает несколько серий таких датчиков. Наибольшую известность получили датчики приближения серий 103SR, SR3 и 400SR. Преобразователем магнитного поля в этих датчиках служит магнитоуправляемая интегральная микросхема, размещаемая в щ1линдрическом алюминиевом (103 SR) или пластмассовом (SR3) корпусе. Датчики серии 400SR размещаются в прямоугольных пластмассовых корпусах. Внешний вид датчиков приведен на рис. 5.28. 25,4 25,4 В 103SR 400SR 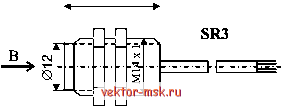 В
Рис. 5.28. Внешний вид датчиков приближения серий 103SR, SR3 и 400SR Датчики имеют разомкнутую магнитную систему. Управляющее поле создается внешним постоянным магнитом, закрепляемом на контролируемом объекте. Напряжение питания датчиков составляет от 4,5 до 24В при токе потребления от 4 до 13 мА (в зависимости от типа датчика). Выход датчиков рассчитан на работу в режиме открытого коллектора или в режиме открытого эмиттера с током коммутации до 20 мА. Максимальная частота переключений датчиков не превьппает 100 кГц. Диапазон рабочих температур составляет от 0...+85 °С до 0...+100 °С. Длина датчиков (103SR, SR3) не превьппает 25,5 мм при диаметре до 15 мм. Снаружи корпуса оба варианта датчиков имеют соответствующую резьбу. Габаритные размеры датчиков серии 400SR не превьппаюг 25 х 17 х 11 мм. [37, 41, 49, 50] Промышленные образцы датчиков приближения отечественного производства В СССР практически не существовало специализированных предприятий, вьшускаюших магнитные датчики перемещения и приближения. Каждая отрасль разрабатьшала и изготавливала для своих нужд ограниченные партии МД. В качестве магниточувствительных элементов использовались магниторезисторы типа СМ4-1 и магнитоуправляемые микросхемы серии К1116КП. Некоторые предприятия использовали для этих целей дискретные элементы Холла известных серий ПХЭ, ДХП, ХИМ, ХИС и др. В работе [18] сообщалось о разработке ПО Гиперон на базе магнитоуправляемых интегральных схем серии К1116 КП магнитных датчиков приближения типа МДП-01...МДП-05. Магнитные датчики МДП-01...МДП-05 изготовлены в точеных алюминиевых корпусах с наружной резьбой. В 1999 году акционерным обществом Сенсор (г.Зеленоград) начато производство целой серии магнитных датчиков различного назначения. Датчики вьшускаются на основе тонкопленочных магниторезисторов. [8] Основные параметры и характеристики датчиков перемещения и приближения, вьшускаемых наиболее известными производителями, приводятся в гааве 14 тома 2. См. также [8, 18, 26, 29, 31, 33, 34, 37, 38, 39, 41, 44, 47,48, 52, 53]. 5.2. Щелевые магнитные датчики Отдельный класс датчиков положения представляют, так называемые щелевые магнитные датчики (ЩМД). В зарубежной литературе такие датчики называются лопастные или лопаточные. ЩМД представляет единую конструкцию, содержащую постоянный магнит и преобразователь магнитного поля, расположенные на определенном расстоянии напротив друг друга. В качестве ПМП могут использоваться элементы Холла, магниторезисторы, магнитотранзисторы и другие приборы. Однако наибольшее распространение в качестве ПМП щелевых датчиков получили магнитоуправляемые интегральные схемы, использующие указанные преобразователи в качестве магниточувствительных элементов. Па рис. 5.29 приведено устройство простейшего щелевого магнитного датчика. Основными элементами ЩМД служат магнитоуправляемая микросхема и постоянный магнит (ПМ). При этом ПМ и МУМ жестко закреплены в оригинальном корпусе, изготовленном из немагнитного материала. Управляющем элементом датчика является шторка-замьпсатель магнитного потока, вьшолненная из ферромагнитного материала. Более сложные конструкции содержат специальные концентраторы магнитного поля, формируюпще узкий рабочий зазор с равномерным распределением в нем магнитного потока. Рабочий Магнитоуправляемая зазор Постоянный магнит 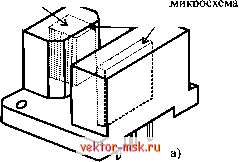 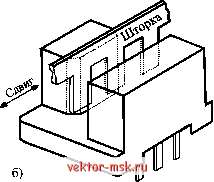 Рис. 5.29. Конструкция щелевого магнитного датчика Принцип действия щелевого магнитного датчика иллюстрируется на рис. 5. 29. Он достаточно прост. Нормальное состояние для датчика (рис. 5.29).- Включено . Если в рабочий зазор датчика ввести пластину из ферромагнитного материала (рис. 5.29.6), то линии поля прервутся и магнитоуправляемая микросхема перейдет в положение Вьпслючено . Форма и конструкция шторки-замыкателя может быть, в зависимости от назначения датчика, самой разнообразной (Рис. 5.30). 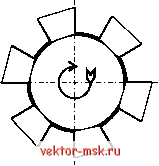 4j\ п1 Рис. 5.30. Конструкция шторок-замыкателей, используемых в щелевых магнитных датчиках: а -колесо-обтюратор; б - гребенка ; в - цилиндр. На рис. 5.30.а показано плоское зубчатое колесо, используемое для модуляции оптического излучения. Существенное преимущество магнитного датчика перед оптронными - это отсутствие источника излучения (потребляющего сравнительно большой ток - 20...100 мА), а также нечувствительность к засветкам и запьшенности. На рис. 5.30.6 показана, наиболее часто встречающаяся конструкция замьпсателя, т.н. гребёнка . Окна и зубцы гребенки имеют здесь прямоугольную форму, а не сектора (см. рис. 5.30.а), что улучшает форму выходных импульсов, когда интервал времени Включено больше, чем интервал времени Вьпслючено . Наиболее компактным вариантом ЩМД представляет конструкция с цилиндрическим прерьшателем (см. рис. 5.30.В). Конструкция прерьшателя, как правило, определяется как параметрами самого датчика, так и условиями его применения. Наиболее распространенными минимальными размерами для прерывателей ЩМД являются: толщина Н=1...1,5 мм, ширина зубца b = 10 мм, ширина окна W= 10 мм и высота зубца h = 10 мм. Максимальная толщина прерьшателя ограничивается величиной рабочего зазора - 5. Площадь зубца прерьшателя, нерекрьшающего магнитный поток в зазоре между магнитом и приёмной поверхностью магнитоуправляемой ИС, определяется произведением h х Ь. Однако выбранные недостаточно большими ширина окна W и высота зуба h могут привести к тому, что в зазоре датчика в переходный момент будут присутствовать края двух зубцов сразу, что приведет к ложным срабатьтаниям микросхемы. Магнитоуправляемая микросхема г Зубец X i /s\\ : I N прерыв
торка-прерыватель Постоянный агнит Зубец 2 Центр Сдвиг Рис. 5.31. к пояснению принципа работы щелевого магнитного датчика 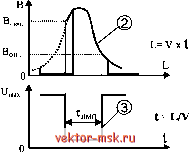 На рис. 5.31.а приведены графики прохождения зубцом рабочего зазора ЩМД. Индукция В в свободном зазоре изменяется по длине L согласно графику 1 (рис. 5.31.6). Когда край зубца 2 входит в зазор, то он экранирует часть магнитного потока и зависимость B=F(L) становится более сложной (см. график 2, рис. 5.31.6). График 3 соответствует положению во времени выходного импульса микросхемы, которая включилась в момент tgj (индукция срабатьтания В^р^) и вьпслючилась в момент tgjj (индукция отпускания В^,). Так как линейная скорость движения зубца составляет V, то длительность выходного импульса для одиночного зубца можно ОПр'* * AZ b Г.. - 1 - - - - (5.10) екп еъгкл V V Однакот перед входом зубца 2 в зазорт срез зубца 1 должен выйти за точку Bj графика 1 (рис. 5.31.6). 5.2.1. Примеры технической реализации щелевых магнитных датчиков Простейший вариант конструкции щелевого магнитного датчика можно реализовать, используя магнитоуправляемую микросхему и миниатюрный постоянный магнит. На рис. 5.32 в качестве примера приведен внешний вид и габаритные размеры миниатюрного щелевого магнитного датчика, реализованного на основе отечественной магнитоуправляемой микросхемы К1116КП9 и постоянного магнита из сплава самарий-кобальт . Основные параметры датчика приведены в таблице 5.2. Постоянный 3 5 18 Магаитоуправляемая магнит. Рис. 5.32. Внешний вид и габаритные размеры миниатюрного щелевого магнитного датчика, реализованного на основе отечественной МУМ типа К1116КП9 и постоянного магнита из сплава самарий-кобальт м 10 max интегральная схема 0,4 x 0,4 |















