
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 [ 58 ] 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Четьфе магниторезисторных элемента (рис. 5.22), каждый длиной L, расположены крестообразно. Элементы подключены к источникам тока, и через них проходит ток I. Выходное напряжение, пропорциональное составляющей перемещения по горизонтальному направлению снимается с выводов А и В, а выходное напряжение составляющей перемещения по вертикальному направлению - с выводов С и D. Полюсный наконечник имеет квадратную форму со стороной, равной длине каждого элемента L. Начальное положение датчика имеет место, когда наконечник расположен симметрично относительно центрального электрода, при этом половина длины каждого МЧЭ находится под воздействием управляющего магнитного поля и выходные напряжения, снимаемые с концов каждого элемента, равняются нулю. [16] При перемещении полюсного наконечника в любом направлении на плоскости X-0-Y на выводах элементов 1 и 2 возникают два независимых напряжения со знаком полярности, соответствующих направлению горизонтальной и вертикальной составляющих перемещения и пропорциональных им: о (5.9) 5.1.5. Промышленные образцы датчиков перемещения Промьппленное производство магнитных датчиков перемещения осуществляется многими зарубежными фирмами. Наиболее известными являются фирмы: Honeywell, Murata, Allegro, Hitachi, Siemens, RS Components и др. Зарубежными фирмами выпускается широкая номенклатура магнитных датчиков перемещения с использованием практически всех известных типов преобразователей магнитного поля. Основные параметры и характеристики магнитных датчиков перемещения, вьшускаемых ведущими зарубежными фирмами приводятся в главе 14 тома 2. Далее в качестве примера приводятся характеристики отдельных типов датчиков перемещения, вьшускаемых зарубежными производителями. Датчики перемещения на основе магниторезисторов На рис. 5.23 в качестве примера приведен внешний вид датчика перемещений типа FP-210, который вьшускается фирмой Siemens A.G. с применением дифференциального монолитного магниторезистора. FP-210  Ферромагнитная деталь 10 13,5  Рж. 5.23. Внешний вид и габаритны датчика перемещений типа FP-210, выпускаемого фирмой Siemens A.G Датчик перемещений типа FP-210 построен по схеме с разомкнутой магнитной системой. Он содержит два монолитных магниторезистора, включенных по дифференциальной схеме и встроенный постоянный магнит. При этом магниторезисторы Rj, и R, 3 включаются в схему моста (рис. 5.24.а), что позволяет компенсировать (в определенных пределах) уход параметров датчика при изменении температуры окружающей среды. \-Г- +ип5ВЦ R1 1 к 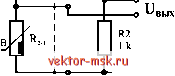 О -Un5B  Рис. 5.24. Датчик перемещений типа РР-210:а - схема включения; б - форма выходного сигнала Рис. 5.24.в. Выходная характеристика датчика перемещений типа FP-210
О 0,2 0,3 в) Датчик (рис. 5.23) функционирует следующим образом. При приближении ферромагнитной детали, закрепленной на контролируемом обьекте, к торцу датчика на выходе моста возникает сигнал разбаланса Ug изменяющийся в зависимости от положения перемещающейся детали (рис. 5.24.6). При этом имеется в виду, что ширина перемещаемой детали примерно равна ширине одного МЧЭ (порядка 2 мм). Из кривой (рис. 5.26.6.) видно, что на определенном участке (отмечен пунктирной линией) наблюдается линейная зависимость между UgnjH расстоянием X. Характер изменения выходного напряжения Uj, т.е. достижение им сначала максимума, а затем минимума (или наоборот) зависит (при неизменной полярности источника питания моста) от направления движения перемещаемой ферромагнитной детали. Так если деталь перемещается по отношению к торцу датчика снизу вверх, то изменение напряжения Uj имеет сначала максимум, а затем минимум, а при перемещении сверху вниз Uj будет иметь сначала минимум, а затем максимум. Это обстоятельство может быть использовано для определения направления перемещения подвижной ферромагнитной детали. С этой целью напряжение Ug моста подается на вход переключающей схемы, гистерезис которой имеет несколько большее значение, чем возможные при отсутствии перемещаемой детали колебания значения Ugj. В этом случае переключающая схема будет фиксировать состояние, соответствующее последнему экстремуму Ugj. Па рис. 5.24.В. изображена зависимость выходного сигнала Ug в % от расстояния d между торцами подвижной ферромагнитной детали контролируемого объекта и датчика. За 100 % значения сигнала принято напряжение на выходе моста при d = 0,2 мм. Масса FP-210 составляет всего 2,4 г.; диапазон рабочих температур от -25 до +80° С ; предельная частота переключений до 20 кГц. Величина сигнала на выходе моста при напряжении питания 5 В и расстоянии между ферромагнитной деталью и торцом датчика d = 0,2 мм составляет 850 мВ, а при удалении пластины на расстояние больше 5 мм составляет не более 180 мВ. Датчики линейного неремещения на основе МЧМС Конструкции магнитных датчиков линейного перемещения с применением магниточувствительных интегральных схем практически мало чем отличаются от приборов, разработанных с применением иных преобразователей магнитного поля. Па рис. 5.25 в качестве примера приведен внешний вид магнитного датчика линейных перемещений типа APS3A2AA. Рис. 5.25. Внешний вид датчика линейного перемещения типа APS3A2AA: 1 - магниточувствительная ИС; 2 -постоянный магнит; 3 - поводок; 4- пластмассовый корпус; 5-3-хпроводныйкабель Направление перемещения   В качестве преобразователя магнитного поля в датчике APS3A2AA использована кремниевая магниточувствительная микросхема 1. В состав датчика входит миниатюрный постоянный магнит 2, жестко соединенный с поводком 3. Вектор перемещения контролируемого объекта передается датчику через поводок 3, который перемещает постоянный магнит 2 параллельно чувствительной поверхности МУМ. Все элементы датчика размещаются в пластмассовом корпусе 4 из которого выходит 3-х проводный кабель 5, соединяющий датчик с внешними устройствами. Основные параметры датчика типа APS3A2AA приведены в таблице 5.2. Таблица 5.2. Основные параметры датчика типа APS3A2AA
На рис. 5.26 приведена конструкция датчика линейных перемещений, вьшускаемого фирмой ММТ . Конструкция датчика достаточно проста и не требует особых пояснений. В качестве магниточувствительного элемента 6 используется элемент Холла, размещенный в зазоре магнитной системы 5. Рис. 5.26.Конструкция датчика линейных перемещений фирмы ММТ :1- шток; 2-корпус; 3 - кабель; 4 - плата с электронной схемой; 5 - магнитная система; 6 -элемент Холла (ЭХ); 7 - магнитный шунт; 8 - возвратная пружина 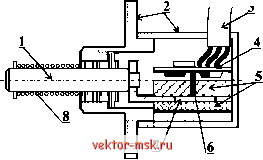 Вектор перемещения контролируемого объекта через шток 1 передается подвижному магнитному шунту 7 перемещение которого приводит к изменению сигнала ЭХ. Сигнал элемента Холла усиливается электронной схемой, расположенной на плате 4. Электронная схема датчика содержит все элементы, необходимые для термостабилизации его основных параметров. Выходные характеристики датчика приведены на рис. 5.27, а его основные параметры приводятся в таблице 5.3: Таблица 5.3: Основные параметры датчика линейных перемещений фирмы ММТ
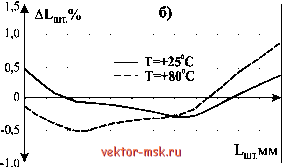 О 02468 10 12 02468 Рис.5. 27. Датчик линейных перемещений фирмы ММТ : а - выходная характеристика; б зависимость погрешности измерения (А L) от расстояния (L при температуре 25 и 80 10 12 -типовая |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















