
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 [ 56 ] 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Датчики с замкнутой магнитной системой (рис. 5.9) представляют собой устройства, управление которыми осуществляется при помощи перемещающихся постоянных магнитов, установленных на объекте контроля.  Изменение индукции МП) и сопротивления МЧЭ при nqxaMcnchhh / постояниаго магнита / I Ф ;;--n\ S 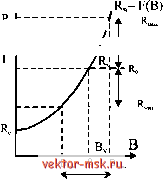 Рж. 5.9. Замкнутая магнитная система датчика перемещения: 1 - постоянный магнит; 2- магнитопровод; 3-магниточувствителъный элемент (магниторезистор): 4 - постоянный магнит на подвижной детали Вариант конструкции замкнутой магнитной системы схематически показан на рис. 5.9. При перемещении подвижной детали с закрепленным на ней постоянным магнитом 4 вблизи воздушного зазора, в котором помещен ПМП, магнитный поток, пронизывающий плоскость МЧЭ, сначала уменьшается, а затем увеличивается. Если постоянный магнит 4 перемещать не сверху вниз, а, наоборот, снизу вверх, то магнитный поток, пронизьшаюпщй МЧЭ, будет сначала возрастать, а затем убьшать. Это свойство может быть использовано для определения направления перемещения подвижной детали. При проектировании датчиков линейного перемещения используют зависимости B=F(D), приведенные на рис.5.4...5.7. При этом в качестве магниточувствительных элементов используется широкий круг дискретных ПМП (например, элементы Холла, магниторезисторы, магнитодиоды, магнитотранзисторы) или магниточувствительные микросхемы на их основе. При использовании зависимости, приведенной на рис.5.3.а когда однополюсный магнит приближается перпендикулярно поверхности датчика, гиперболическую кривую плотности магнитного потока можно линеаризовать путем выбора короткого отрезка кривой или путем подключения к датчику схемы, вьгаисляющей значение 1/Х . В зависимости от величины индукции магнита измеряемый путь может лежать в диапазоне от 2 до 30 мм. При использовании всего диапазона положительных и отрицательных значений плотности магнитного потока в процессе, так называемого двухполюсного аксиального приближения, (рис. 5.7.а) получается приблизительно линейная кривая плотности магнитного потока. В этом случае два связанных друг с другом одноименных магнита, расположенных на некотором расстоянии друг от друга, аксиально движутся к поверхности датчика. Датчик линейного перемещения может располагаться в воздушном зазоре и в среднем положении не подвергается воздействию магнитного поля (плотность магнитного поля равна нулю), так как два противоположно направленных магнитных поля взаимно уничтожаются. При сдвиге магнита в одну из сторон начинает преобладать положительная или отрицательная составляющая магнитного поля. Указанный характер взаимодействия (рис. 5.7.а) отличается хорошей линейностью и позволяет при помопщ магнитов соответствующей длины производить измерение расстояний до 200 мм. [27] Следует иметь в виду, что в обоих типах магнитных система преобразователь магнитного поля имеет начальное магнитное смещение. Это важно для случая использования в качестве ПМП магнитодиодов и магниторезисторов, так как появляется возможность повьппения чувствительности датчика. Варианты конструктивного оформления датчиков перемещения Простейший датчик перемещения (рис. 5.10) содержит только один из дискретных магниточувствительных элементов (например, элемент Холла, магниторезистор, магнитотранзистор, магнитотиристор, магнитодиод и т.п.), размещенных в специальном запщтном корпусе, как правило, из немагнитного материала (алюминий, латунь, пластмасса, керамика и пр.). В случае необходимости в том же корпусе может размещаться миниатюрный постоянный магнит (рис. 5.11). При этом следует отметить, что все основные параметры таких датчиков полностью определяются параметрами МЧЭ. Концентратор магнитного Магниточувствитсльный^одя злема Рис. 5.10. Устройство датчика перемещения с разомкнутой магнитной системой  Арматура 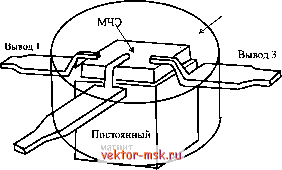 Рис. 5.11. Устройство датчика перемещения с встроенным постоянным магнитом Вывод 2 Сложный датчик неремещения (рис. 5.12), кроме ПМП и магнита содержит ещё электронную схему усиления и обработки сигнала, а также встроенный источник нитания, (например, стабилизатор напряжения). Магниточувствительный Источник питания элемент в Рис.5. 12.Устройство сложного датчика перемещения со смещающим магнитом и электронной схемой усиления и обработки сигнала.  Смещающий магнит Арматур 5.1.2. Магнитные датчики линейного перемещения Датчики лииейиого перемещения (ДЛП) предназначены для преобразования линейного перемещения объекта контроля в выходной электрический сигнал, пропорщюнальный этому перемещению. Основное требования к датчикам линейного перемещения - это линейная зависимость выходного сигнала от расстояния перемещения. Принщш работы датчиков линейного перемещения поясняется на рис. 5.13. Постоянный магнит. Ферромагнитная деталь, установленная Направление перемещения на контролируемом объекте Направление перемещения Датчик линейного перемещения D
установленный на контролируемом обьекте S n Рис.5. 13. Принцип работы датчиков линейного перемещения: а- с замкнутой и б- с разомкнутой магнитной системой Примеры технической реализации датчиков линейного перемещения Датчики линейного неремещения на основе магниторезисторов Магниторезисторы используются для изготовления магнитных датчиков линейного перемещения, обладающих повьппенной точностью. Такие датчики, как правило, имеют небольшую длину рабочего хода. Для создания таких датчиков используют миниатюрные магнитные системы, характеризующиеся определенным законом изменения магнитного поля. Парис. 5.14. приведены возможные конструкщш замкнутых магнитных систем датчиков линейного перемещения на магнигорезисторах. Это достигается путем создания специальной формы воздушного зазора, в котором перемещается магниторезистор (рис. 5.14.а), или использованием др. конструктивных решений. Магниторезистор при этом жестко связан с приводным механизмом датчика (штоком, поводком и т.п). 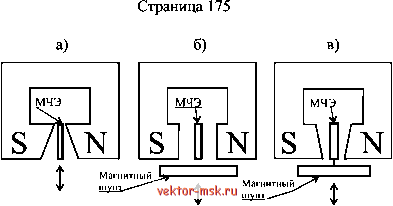 Направление перемещения шунта. Рис. 5.14.Варианты конструкций магнитных систем датчиков перемещения на магниторезисторах В конструкции ДЛП, схематически показанного на рис. 5.14.6, магниторезистор зафиксирован в воздушном зазоре магнитной системы, а требуемый закон изменения сопротивления обеспечивается за счет применения подвижного магнитного шунта, который жестко связан с приводным механизмом. Если необходимо получить более резкую зависимость сопротивления от перемещения объекта, используют конструкцию, представленную на рис. 5.14.В. В ней сочетаются специальная форма воздушного зазора магнитной цепи с использованием подвижного магнитного шунта. При нажатии, например, на шток приводного механизма датчика такой конструкции перемещаются магниторезистор и магнитный шунт. Папряженность магнитного поля быстро падает и сопротивление МЧЭ изменяется. Па рис. 5.15 показаны замкнутая магнитная система датчика перемещения, спроектированного по схеме рис. 5.15.а и зависимость сопротивления магниторезистора (R) от расстояния d. В этом датчике примененен магниторезистор типа СМ4-1. Датчик предназначен для точного контроля малых перемещений. Выходная характеристика датчика отличается хорошей линейностью. [И] Постоянный магнит агниторезистор 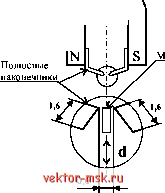
20 40 120 140 160 80 100 6) Puc. 5.15. Датчик перемещения с использованием магниторезистора типа СМ4-1: а - магнитная система; б -выходная характеристика 5.1.3. Магнитные датчики приближения Датчиками приближения принято назьшать устройства, назначение которых состоит в вьщаче выходного сигнала ( О или 1 ) в том случае, если какая-либо перемещающаяся деталь контролируемого объекта достигнет определенного, наперед заданного положения (D. Часто такие датчики назьшают датчиками конечного положения (ДЮТ), а также датчиками близости. В общем виде датчики приближения состоят из магнитной системы и преобразователя магнитного поля в комплекте со схемой усиления и обработки сигнала ПМП. Принцип действия таких устройств основан на возникновении электрического сигнала ( О или 1 ) на выходе датчика при воздействии на него магнитного поля определенной интенсивности. Так как напряженность магнитного поля определяется положением перемещающейся детали, то при приближении ферромагнитной детали контролируемого объекта ближе расстояния, равного D происходит срабатывание датчика. При удалении детали на расстояние, равное датчик возвращается в исходное состояние. Принцип работы датчиков поясняется на рис. 5.16. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||















