
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 [ 55 ] 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Характер взаимодействия МЧЭ датчиков с управляющим магнитным нолем Все магнитные датчики имеют одно общее свойство - их магниточувствительные элементы взаимодействуют с нолем постоянного магнита (ПМ) и ферромагнитными элементами объектов контроля. Характер взаимодействия с ПМ и реакция датчиков типичны для абсолютного большинства видов преобразователей магнитного поля. Для пояснения принципов работы датчиков, используюпщх постоянные магниты, нарис.5.3...5.7 приведены без подробных разъяснений наиболее часто встречающееся схемы и характер взаимодействия ПМ с МЧЭ. [37] \ , \ \ \ \ 1 4< ! I ! 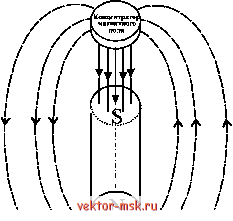 а) б) Рис. 5.3. Распределение поля рассеяния постоянного магнита (а), и влияние концентратора - (б) Па рис. 5.4. приведена зависимость магнитной индукции от расстояния до магнита. 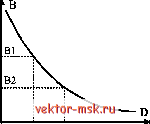 D1 D2 Расстояние 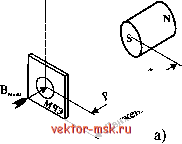 Концентратор магнитного поля 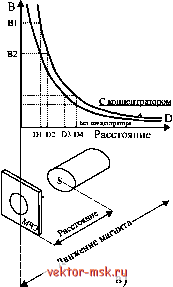 Рис. 5.4. Зависимость индукции ПМот расстояния до МЧЭ (а), и при использовании концентратора магнитного поля - (б) В случае, изображенном на рис.5.4.а, однополюсный магнит приближается перпендикулярно поверхности магниточувствительного элемента. Зависимость B=F(I имеет гиперболический характер. С определенной степенью приближения можно утверждать, что В ~ 1/D . При использовании простейшего концентратора магнитного поля (например, тонкой пластины из пермаллоя или феррита) гиперболическая кривая B=F(D) смещается параллельно вверх. (См. рис. 5.4.6.) о -в  см. магнита Cq Амещуопщм магшгюм D1 D2 ......Смёщшвщёё'fiojie 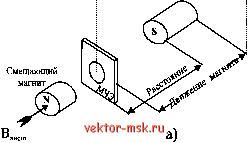 В  Со смещающим магнитом -! Смещающее поте Без см. магнита 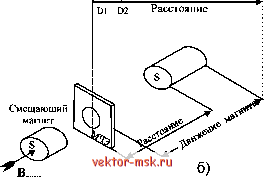 Рис. 5.5. Зависимость индукции ПМ от расстояния до МЧЭ при использовании смещающих магнитов разной полярности При проектировании аналоговых магнитоэлектронных приборов обычно используют короткий квазилинейный участок характеристики D1-D2 или применяют специальную схему, вычисляющую функцию 1/D . В зависимости от параметров ПМ и ПМП линейный участок может лежать в диапазоне от 1 до 50 мм. При использовании смещающих магнитов разной полярности кривые B=F(D) принимают вид, приведенный на рис. 5.5.а,б. Рис. 5.6. Зависимость индукции магнитного поля при боковом перемещении ПМ Па рис. 5.6. приведена зависимость индукции магнитного поля при боковом перемещении ПМ. При боковом перемещении постоянного магнита и сохранении постоянным зазора, на МЧЭ воздействует магнитное поле с положительным направлением потока в случае лежащего напротив южного полюса, и с отрицательным - в случае северного магнитного полюса. 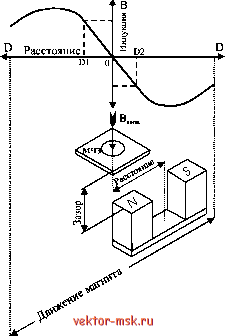 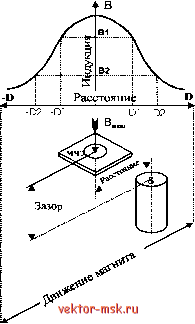 Па рис. 5.7. приведена зависимость индукции магнитного поля при параллельном перемещении двухполюсного и трехполюсного магнитов. Рис. 5.7.а. Зависимость магнитной индукции при параллельном перемещении двухполюсного магнита с зазором
 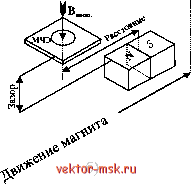 Рис. 5.7. Зависимость магнитной индукции при параллельном перемещении: двухполюсного магнита; в - трехпо-люсного магнита. 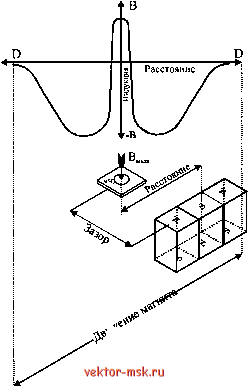 Принцип действия и конструкции магнитных датчиков перемещения Принцип действия магнитных датчиков перемещения (МДП) основан на изменении электрического сигнала на выходе МДП при изменении положения контролируемого объекта. Так как чувствительным элементом датчика перемещения является преобразователь магнитного поля, то изменение выходного сигнала фиксирует изменение величины индукции магнитного поля, воздействующего на магниточувствительный элемент МДП. Основные характеристики магнитных датчиков определяются параметрами используемых ПМП и магнитной системы. Несмотря на большое различие последних, все они могут быгь разбиты на две основные группы: датчики с разомкнутой магнитной системой; датчики с замкнутой магнитной системой. Датчики с разомкнутой магнитной системой представляют собой устройства, управление которыми осуществляется при помощи магнитных шунтов, закорачивающих магнитное поле, сформированное встроенным постоянным магнитом. В качестве шунта обьгано используется перемещающаяся ферромагнитная деталь, установленная на объекте контроля. Вариант конструкции разомкнутой магнитной системы схематически приведен на рис. 5.8. На одном из полюсов постоянного магнита 1 находится полюсной наконечник 2 с преобразователем магнитного поля 3. При перемещении ферромагнитной детали 4 вблизи полюсного наконечника 2 усиливается магнитный поток на полюсном наконечнике, приводящий к изменению сигнала на МЧЭ. [11] 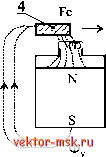
в Рис. 5.8. Разомкнутая магнитная система датчика перемещения: 1 - постоянный магнит; 2-магнитопровод; 3- магниточувствительный элемент (магниторезистор): 4 - ферромагнитная подвижная |















