
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [ 53 ] 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Таблица 4.1. Основные параметры интегральной матричной магниточувствительной структуры
Дополнительную информацию см. в [1, 2, 3, 4, 5, 6, 7, 8]. Список литературы к главе 4 1. 2. Абакумов А. А. Магнитная интроскопия. - М.: Энергоатомиздат, 1996. - 272 с. Абакумов А. А. (мл.), Амеличев В. В., Галушков А. И., Лебедев В. Л. Исследование интегрального матричного преобразователя магнитного поля на основе МОП магнитотранзисторов. Тезисы докладов ix научно-технической конференции Датчики и преобразователи информации систем измерения, контроля и управления (датчик-97) , г. Гурзуф, 1997. Абакумов А. А. Устройство преобразователей для визуализации магнитных полей. Дефектоскопия, № 1, 1984..-С. 3-13. Абакумов А. А., Абакумов А. А. (мл.), Галушков А. И. Перспективы применения матричных полупроводниковых преобразователей магнитного поля в системах слежения за развитием трещин трубопроводов и резервуаров. Тезисы докладов x научно-технической конференции Датчики и преобразователи информации систем измерения, контроля и управления (датчик-98) , г. Гурзуф. Абакумов А. А., Абакумов А. А. (мл.), Чапльптш Ю. А., Галушков А. И. Оценка погрешностей, калибровка и градуировка полупроводниковых матричных сканеров распределенных магнитных полей. Тезисы докладов viii научно-технической конференции Датчики и преобразователи информации систем измерения, контроля и управления (датчик-96) , г. Гурзуф, 1996. Аксененко М. Д., Бараночников М. Л., Смолин О. В. Микроэлекгронные фотоприемные устройства. - М.: Эиергоиздат, 1984. - 208 с. Сухоруков В. В., Вайнберг Э. П., Кажис Р-И. Ю., Абакумов А. А. Перазрушаюпщй контроль Интроскопия и автоматизация неразрушающего контроля: В 5 кн. / Под ред. В. В. Сухорукова. - М.: Высшая школа,. 1993.-Кн. 5.-С. 290-322. Щербинин В. е., Шлеенков А. с, Булычев О. А., Мизгунов Ю. А. Тонкопленочный матричный преобразователь для систем магнитной микроскопии и томографии. Материалы xiy Российской научно-технической конференции Перазрушаюпщй контроль и диагностика . - М., 1996. - 218 с. Основные характеристики датчиков Входная величина - величина, воспринимаемая и преобразуемая датчиком. Выходной сигнал датчика представляет собой определенное изменение несущей величины (тока, напряжения и т.п.), используемое для передачи информации. Изменение (модуляция) несущей величины может осуществляться по амплитуде, по переменному признаку (изменение частоты, длительности воздействия, порядка чередования воздействий), а также по пространственному признаку (чередование сигналов в каналах связи). Классификация электронных датчиков по выходным сигналам приведена в табл. 5.1. Таблица 5.1.Классификация электронных датчиков по выходным сигналам Характеристика сигнала Виды сигналов Непрерывные по времени Ток Сила постоянного тока Сила переменного тока Напряжение Напряжение постоянного тока Напряжение переменного тока Дискретные во времени Импулы;ы постоянного тока (видеоимпулы;ы) Импулы;ы переменного тока (радиоимпулы;ы) Способ модуляции По амплитуде По амплитуд По частоте По амплитуде импулы;а длительности импулы;а По фазе импулы;а числу импулы;о По комбинации импулы;о Название сигнала Единица измерения Токовый мА Токовый мА Сигнал по напряжению мВ по напряжению Частотный Ампли-тудно-импуль- сная модуляци я(АИМ) Широтно-импуль- сная модуляци яСШИМ) Фазо-импуль- сная модуляция (ФИМ) Число-импульсный код Цифровой код Примерные количественные характеристики. Вид сигнала. 0...5 0...20 0...100 0...5 0...20 0...100 0...20 0...50 0...100 0..1 ООО 0...5000 0... 10000 0...20 0...50 0...100 0..1 ООО 0...5000 0...10000 0...100 0...200 1000... 2500 Гц т 1Ш Статическая характеристика датчика - функциональная зависимость между изменениями входной X и выходной Y величинами. Наиболее приемлемой для большинства случаев является линейная характеристика, определяемая зависимостью: Y=SxX (5.1) где - назьшается чувствительностью датчика. Нри S=oo ?характеристика принимает релейный характер. Реле можно рассматривать, как частный вид датчика, который характеризуется скачкообразными изменениями выходной величины Y при определенных значениях входной величины Х^ и Х^ (см. рис.5.1.6), назьшаемых соответственно параметром срабатъшапия и отпускания реле. Отношение отп - - назьшается коэффициентом возврата. Глава 5. Микроэлектронные магнитные датчики Датчиком, или первичным преобразователем, называют устройство, осуществляющее восприятие контролируемой величины и преобразование её в величину, удобную для передачи по линиям связи и дальнейшего преобразования. Для понимания принщшов действия ниже приведем основные понятия, а также специфические параметры и определения, характерные для датчиков. а разность JC - = Д - называют дифференциалом реле. Гистерезисом датчика называется неоднозначность хода его статической характеристики нри увеличении или уменьшении входной величины (см. рис. 5.1.). 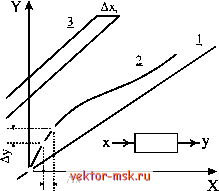 АХ <-► -►X Рис. 5.1. К понятию гистерезиса (5.2) В обш;ем виде гистерезис вьфажается в процентах: \=[AXx{X-XJ]yAOO гдеХ -X - изменение входной величины в рабочих пределах. макс мин - - Для магнитоуправляемых интегральных схем и магнитных датчиков на их iniiaa гистерезис АД определяется как: R - R (5.3) где В^р^ - индукция срабатъшапия магнитоуправляемой микросхемы, мТл; В^ - индукция отпускания магнитоуправляемой микросхемы, мТл. Порог чувствительности датчика определяется как минимальное изменение входной величины, вызьшающее изменение выходного сигнала. Основная погрешность датчика характеризуется максимальной разностью между получаемой величиной выходного сигнала и его номинальным значением, определяемым по статической характеристике для данной входной величины при нормальных условиях. Она вьфажается как в абсолютных единицах: у = У-Ун (5.4) Так и в относительных. В последнем случае её обьгано относят к разности предельных значений выходной величины и вьфажают в процентах: (сгу X 100 ) (5.5) ( У макс У мин ) Нормальными условиями эксплуатации датчиков обьгано считаются следуюпще: температура окружающей среды 20±5°С; атмосферное давление 760±20 мм. рт. ст.; относительная влажность окружающего воздуха 60±20%. Вибрации, паразитные электрические и магнитные поля при этом отсутствуют. Дополнительные погрешности датчика это погрешности, вызьшаемые изменением внешних условий по сравнению с их номинальными значениями. Они вьфажаются обьгано в процентах, отнесённых к изменению мешающего фактора на определённую величину (например, температурная погрешность 1,5 % на 10 °С; погрешность от внешнего магнитного поля 0,2 % на 10 мТл и т.д.). |















