
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 [ 106 ] 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Магнитоэлектронное устройство для дефектоскопии ферромагнитных изделий, реализованное с применепием тонкоплепочных магниторезисторов Высокочувствительные тонкопленочные магниторезисторы все чаще начинают использоваться в диагностической аппаратуре и приборах. На рис. 6.77 приведена упрощенная схема использования магниторезисторного моста для обнаружения дефектов в изделиях, изготовленных из ферромагнитных материалов. В данном устройстве датчик магнитного поля состоит из тонкопленочного магниторезисторного моста KMZ10 и расположенного за ним постоянного магнита. При перемещении такого датчика над поверхностью, например стального листа, содержащего дефект, возникают искажения топологии магнитного поля. Стальной лист Дефект, KMZ10B N N i N N Постоянньш магнит S S i S S Рж. 6.77. Принцип работы дефектоскопа с использованием тонкопленочного магниторезистора: а - магнитная система; б - характер изменения сигнала Для усиления и предварительной обработки сигнала может использоваться схема, приведенная на рис. 6.78. Схема не требует особых пояснений. В схеме на рис. 6.78 регулировка коэффищ1ента усиления обеспечивается переменным резистором R5. Установка напряжения смещения осуществляется при помощи резистора R2. Схема обеспечивает определенную температурную стабилизащ1Ю параметров, для чего в ее состав включен терморезистор типа KTY81-120 (R6) с отрицательным ТКС. Особенностью применения магнитоэлектронного устройства с использованием магнитной системы (рис. 6.77) и схемы (рис. 6.78) является то, что при точном совпадении центра сквозного дефекта с центром магниторезистивного моста сигнал на выходе устройства становится близким к 0. При этом расстояние до объекта d не является критичным. Эта схема особенно эффективна при нулевых измерениях. +и„ (5В) Балансировка R12 Юк
ВС558В 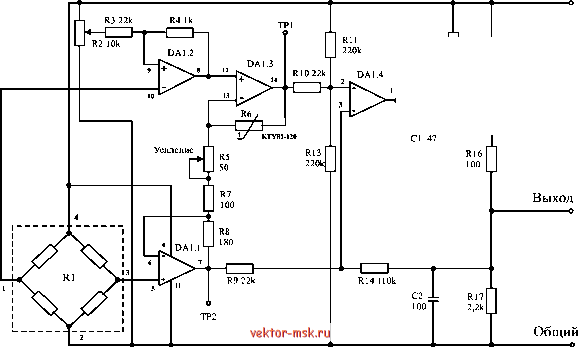 KMZ10B DA1.1...DA1.4 - 1/4 операционного усилителя LM324; R1 - магниторезисторный мост типа KMZ10B; R6 - терморезистор KTY81-120 с отрицательным ТКС; ТР1,ТР2 - контрольные точки. Рис. 6.78. Принципиальная электрическая схема высокочувствительного магнитоэлектронного устройства с использованием тонкопленочного магниторезисторного моста типа KMZ10B Следует отметить, что данная конструкция может использоваться при обнаружении точечных дефектов малого размера. Размеры обнаруживаемых дефектов определяются конструкцией и параметрами магнитного датчика Порог чувствительности магнитоэлектронного устройства составляет примерно (5-10)Х10 Тл. [13, 29]. 6.6.2. Промышленные образцы МЭУ для неразрушающего контроля В последние годы в России несколько активизировалась деятельность по разработке, изготовлению и промьппленному применению оборудования для неразрушающего контроля изделий и материалов. Центром Магнитная диагностика трубопроводов (г. Обнинск) и ГПЦ Технологический центр (г. Зеленоград) создан и успешно эксплуатируется магнитный интраскоп типа МИ-10, который предназначен для диагностирования линейной части газонефтепроводов, обсадных и насосно-компрессорных труб скважин, резервуаров. Диагностирование линейной части газонефтепроводов возможно проводить как при наличии изоляции, так и без нее при капитальном ремонте трубопроводов и при плановом обследовании. Интраскоп может встраиваться во внутритрубные инспекционные снаряды или же располагаться с внепшей стороны трубопроводов в шурфах. Объектами контроля интраскопа являются ферромагнитные изделия простой формы типа труб, котлов, резервуаров, рефракционных колонн, трубопроводов, листового проката и т.д. Принцип действия интраскопа МИ-10 основан на визуализации магнитных полей рассеяния от дефектов, возникающих при намагничивании объектов контроля с помощью передвижных намагничивающих устройств или иным методом, а также при проведение контроля по остаточной намагниченности. При контроле изделий выявляются протяженные дефекты типа нарушения сплошности (коррозионные и усталостные трещины, непровары, язвы) при толщине стенки объекта до 25 мм. Основное отличие магнитного интраскопа МИ-10 от известных приборов, реализующих магнитные методы диагностирования, заключается в получении двух- и трехмерных изображений полей рассеяния дефектов на экране персонального компьютера или видеоконтрольного устройства непосредственно в процессе проведения контроля. По изображению определяются форма дефектов, их размеры, ориентация и взаимное расположение. Интраскоп осуществляет цифровую обработку получаемых изображений дефектов и оценивает их геометрические параметры (длину, раскрытие и глубину). Интраскоп МИ-10 состоит из: сканера магнитного поля; видеоконтрольного устройства (ВКУ); передвижного намагничивающего устройства (ПУ) на постоянных магнитах. В качестве преобразователя магнитного поля в данном интраскопе используются многоэлементные кремниевые магнитотранзисторные линейные структуры, реализованные в интегральном исполнении. Основные параметры интраскопа МИ-10 приведены в табл. 6.4. Предприятием Интрон Плюс (г. Москва) разработаны и вьшускаются измерители износа стальных канатов ИПТРОС . Дефектоскоп ИНТРОС состоит из электронного блока и сменных магнитных головок канатов. Электронный блок дефектоскопа содержит однокристальный микрокомпьютер и память на 1, 2 или 4 Мбайта для запоминания результатов контроля по каналам потери сечения и локальных дефектов. Комплект дефектоскопа включает несколько магнитных головок, каждая из которых может быгь подключена к нему кабелем. Дефектоскоп вьшолняет следующие функции: измеряет потерю сечения каната и обнаруживает локализованные дефекты (обрьшы проволок, локальную коррозию); обеспечивает регистрацию дефекгограмм каната и имеет возможность сопряжения через стандартный интерфейс с внешними устройствами обработки и регистрации информации (IBM-совместимый компьютер и принтер); позволяет контролировать канаты круглого поперечного сечения диаметром от 6 до 64 мм. Контроль канатов обеспечивается при скорости движения каната относительно магнитной головки дефектоскопа в диапазоне от О до 1 м/с при контроле канатов диаметром от 6 до 20 мм и от О до 2 м/с при контроле канатов диаметром от 20 до 64 мм. В качестве преобразователя магнитного поля в дефектоскопе используются элементы Холла [26, 27, 16]. Основные параметры дефектоскопа ИПТРОС приведены в табл. 6.5.
Таблица 6.5. Основные параметры магнитного дефектоскопа ИНТРОС
Таблица 6.4. Основные параметры магнитного интраскопа МИ-10 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















