
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 [ 101 ] 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 6.5. МЭУ в аппаратуре исследовапия и визуализации магнитного поля При контроле сложных технических объектов приходится сталкиваться с нестационарньп*а1 магнитньп*а1 полями, поведение и рельеф которых во многом зависят от режимов работы объекта. Слежение за общим состоянием магнитных полей и их анализ позволяют с большой достоверностью судить о процессах, происходящих в контролируемом сложном объекте, и управлять этими процессами. Задачи контроля нестационарных магнитных полей возникают при работе с различными нроизводственньпйи установками, при исследованиях свойств управляемых технологических процессов, в дефектоскопии ферромагнитных изделий с большой поверхностью и др. Электромагнитные процессы в электротехнике, процессы проката листовой стали в металлургии, производство стальных тросов, труб и постоянных магнитов - все это требует автоматического контроля магнитных полей для осуществления эффективного управления производством. При контроле параметров неоднородного магнитного поля в основном решаются две задачи: определение составляющих градиента магнитной индукции в локальных точках контролируемого объекта; топографирование (или визуализация) всей поверхности объекта. 6.5.1. Измерение параметров неоднородного магнитного поля При определении параметров неоднородного магнитного поля обычно производят измерение напряженности Н или магнитной индукции В и их градиента АВ или АП. Для таких измерений используется специальная аппаратура с применением различных преобразователей магнитного поля. Процесс измерений сводится к сканированию исследуемой поверхности с определением значений В и П в локальных точках данной поверхности. Основньпи параметром измерительной аппаратуры является разрешающая способность. Разрешающая способность характеризует способность аппаратуры измерять значения В или П в двух максимально близких друг к другу точках контролируемой поверхности. Па рис. 6.60.а разрешающая способность определяется расстоянием между точками 1-2. Отрезок, обозначенный а^, определяет предел разрешения. В большинстве случаев разрешающая способность определяется параметрами используемых преобразователей магнитного поля. Паправление сканирования по оси X <-> 100>f.?i - 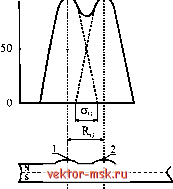 Паправление сканирования по оси X <-> Г;~~~~~Т! .Зонд >-х Исследуемая оверхность 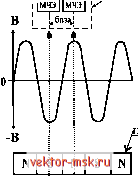 Исследуемая юверхность Рис. 6.60. Схемы определения:а - разрешающей способности; б-градиента магнитной индукции Простейшее устройство для измерения составляющих градиента магнитной индукции состоит из двух преобразователей магнитного поля, размещенных на общем основании. Это устройство называется измерительным зондом. Зонд устанавливается на специальном приспособлении, позволяющем перемещать преобразователи на необходимое расстояние в заданном направлении, например, вдоль осей X или Y. В качестве ПМП обьгано используются элементы Холла или магниторезисторы. Процесс измерений составляющих градиента магнитной индукции сводится к сканированию исследуемой поверхности путем перемещения зонда по осям X и Y с регистрацией координат и величины индукции в каждой паре фиксируемых точек поверхности (рис. 6.60.6). Па рис. 6.61 приведена электрическая схема измерений градиента индукции магнитного поля при использовании в качестве ПМП элементов Холла. Рис. 6.61. Упрощенная принципиальная схема устройства для измерения градиента магнитной индукции, реализованного с применением элементов Холла Источник тока 1 Источник тока 2 В данном случае измерительный зонд представляет собой немагнитное, теплопроводящее основание, которое помещается в металлический корпус из тонколистовой нержавеющей немагнитной стали. На основании, являющемся и плоскостью симметрии датчика, на определенном расстоянии друг от друга закрепляются два идентичных элемента Холла. В этом случае расстояние между центрами магниточувствительных элементов называется базой. Элементы корпуса и кристаллы ЭХ размещаются симметрично относительно общего основания. При этом токовые выводы обоих элементов, питающихся от отдельных источников тока, включаются встречно-последовательно (рис. 6.61). Чтобы повысить точность измерения градиента магнитной индукции, оба элемента тщательной регулировкой токов управления приводят к одинаковой магнитной чувствительности и, при необходимости, используют специальные схемы термостабилизации. Для измерения составляющих градиента магнитной индукции зонд перемещают параллельно исследуемой поверхности и фиксируют координаты зондовой головки и напряжение Холла Vj. При этом в каждом фиксированном положении зондовой головки индукция магнитного поля В может определяться напряжением Холла: Я1 = Г1 X X 1 и Vh2 = Г21 X X уп2 (6.11) где Yj. - магнитная чувствительность элементов Холла; lyjj - ток управления каждого элемента. При наличии неоднородности магнитного поля в направлении, перпендикулярном плоскости МЧЭ, разность холловских напряжений двух ЭХ будет пропорциональна градиенту магнитной индукции, которая при известной базе составляет: AVkxIxAB (6.12) где к - коэффициент, определяемый конструкцией датчика. Благодаря полной симметричности конструкции датчика обеспечиваются строго одинаковые условия теплоотвода от каждого кристалла. Для данных целей элементы Холла изготавливаются по групповой технологии из одной полупроводниковой пластины, поэтому их геометрические размеры и магнитоэлектрические параметры практически одинаковы. Вследствие этого обеспечивается полная идентичность удельных магнитных чувствительностей обеих пластин (у^ = у^), а значит, и тождественность выходных сигналов при измерениях однородных магнитных полей. Для измерения составляющих градиента АВ средних и сильных полей с магнитной индукцией, равной десятым долям теслы и больше, могут использоваться монолитные магниторезисторы, размещенные в любые два соседних плеча мостовой схемы, в диагональ которой включен измерительный прибор. При этом оба магниторезистора обьгано отбираются из одной технологической партии, что обеспечивает идентичность их характеристик. Малые габариты магниторезисторов и специфика их конструкций позволяют расположить их весьма близко друг от друга, что дает возможность измерять очень большие градиенты. Для измерения составляющих градиента АВ слабых полей с магнитной индукцией, равной десятым долям миллитеслы и меньше, могут использоваться тонкопленочные магниторезисторные мосты или специализированные магниторезисторные ИС (например, серии НМС фирмы Honeywell). На рис. 6.62 приведена электрическая схема градиентометра, реализованного с использованием магниторезисторных ИС типа НМС 2002 [47]. Наиболее действенным методом снижения погрешности измерения магнитной индукции, обусловленной наличием ее градиентов, является уменьшение геометрических размеров магниточувствительных элементов, повьппение их магнитной чувствительности и использование планарных многоэлементных линейных и матричных магниточувствительных структур.
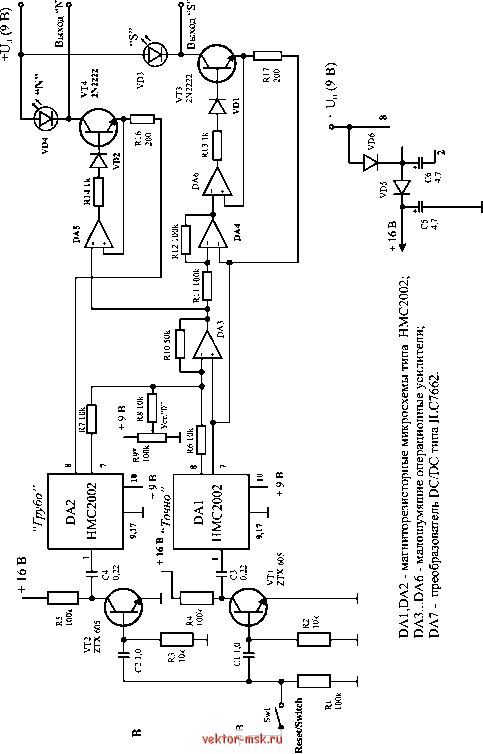 Puc. 6.62. Принципиальная электрическая схема электронного тракта градиентометра, реализованная с применением магниторезисторных микросхем типа НСМ2002 |















