
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Микромагнитоэлектроника: направление технологии 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 [ 100 ] 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 Магнитный датчик Wayfinder-VR Вьшолнен в виде отдельного магнитоэлектронного модуля. Представляет собой цифровой 3-координатный магнитометр, сопряженный с 2-координатным датчиком наклона. Прибор регистрирует магнитное поле, направленое по любой из трех осей (X, Y, Z) и обеспечивает определение азимута при его наклоне до ±50°. В модуле используются магнитоиндуктивные датчики, АЦП, микропроцессор и СПЗУ. Результаты измерений последовательно вьшодятся через 10-штьфьковый разъем в двоично-десятичном или двоичном коде на скорости 5-40 Гц. Для вьшода информации используется стандартный интерфейс RS-232С. Модуль Wayfinder-VR смонтирован на одной печатной плате прямоугольной формы. Максимальные габариты - 63,5X50,8X28 мм, масса - 50 п Магнитный датчик Wayfinder-VR предназначен для применения в навигационной аппаратуре различных транспортных средств и для совместной работы с GPS системами. Основные параметры и внешний вид приборов типа ТСМ-2, Vector-2X, Vector-2GX и Wayfinder-VR приводятся в главе 24 тома 2. Устройства для определения вектора магнитного ноля с применением феррозондов Принципы работы устройств, использующих феррозондовые преобразователи магнитного поля, рассмотрены во многих изданиях технической литературы. А потому в качестве примера приводим очень краткие описания принципов работы нескольких устройств таких устройств. Конструкция простейшего феррозондового датчика направления, используемого в автомобильном навшаторе,щ)иведенанарис.6.54[23]. Измерительная обмотка плоскости У Измерительная Север обмотка плоскости Сердечник (Тор) 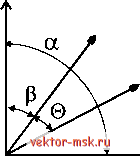 Обмотка возбуждения Восток 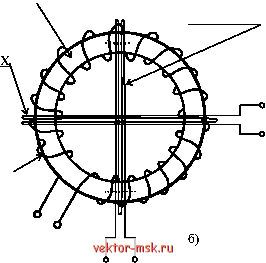 Рис. 6.54. Датчик МПЗ автомобильного навигатора: а - способ вычисления азимута пункта назначения; (б) -устройство датчика: d - курс движения автомобиля относительно севера; 3 - курс на пункт назначения относительно севера; J- относительный азимут (азимут пункта назначения) Магнитометры Vector-2Х и Vector-2GX Вьшолнен в виде отдельного магнитоэлектронного модуля. Представляет собой универсальный цифровой 2-координатный магнитометр, построенный с использованием двух магнитоиндуктивных датчиков. Прибор регистрирует магнитное поле, направленое по любой из двух осей (X, Y). Результаты измерений последовательно вьшодятся по трехпроводной линии в двоично-десятичном или двоичном коде на скорости от 10 Гц. Вьшускается в двух модификациях: Vector-2VX и Vector-2GX. Модуль Vector-2 смонтирован на одной печатной плате прямоугольной формы. Максимальные габариты -38,1X36,3X9,9 мм, масса - 13 п Модуль fctor-2GX смонтирован на двух параллельно закрепленных печатных платах прямоугольной формы. Модуль снабжен двумя миниатюрными механическими карданными подвесами, на которых устанавливаются магнитоиндуктивные датчики, что обеспечивает нормальную работу прибора при значительных угаах наклона. Максимальные габариты модуля Vector-2GX - 33X38,1X15,8 мм, масса - 30 п Магнитометры Vector-2X и Vector-2GX предназначены для применения в навигационной аппаратуре различных транспортных средств, в сейсмической аппаратуре, в аппаратуре для обнаружения изделий и объектов из ферромагнитных материалов и для совместной работы с GPS системами. Датчик навигатора (рис. 6.54.6) представляет собой кольцо из материала с высокой магнитной проницаемостью, на которое намотаны обмотка возбуждения и перпендикулярно друг другу две измерительные обмотки. Принцип действия датчика заключается в следующем. Если на обмотку возбуждения подать переменное напряжение, то магнитный поток в сердечнике будет изменяться и за счет возникновения электромагнитной индукции на выходе измерительных обмоток появится наведенное напряжение. При отсутствии внепшего магнитного поля напряжение на измерительных обмотках будет отсутствовать, поскольку изменение магнитного потока в этом случае вызывает, как показано на рис. 6.55.6, появление в точках S и сердечника напряжений противоположной полярности, которые компенсируют друг друга. а) б) ifcO 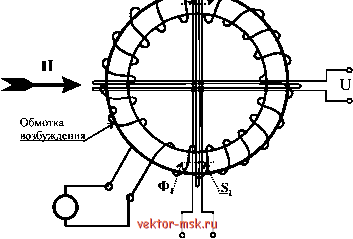 ВЫХ.Х 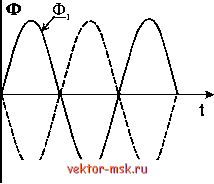 Рис. 6.55. Принцип работы феррозондового навигатора Если перпендикулярно измерительной обмотке X воздействует магнитное поле с напряженностью П, то оно складывается с магнитньпи полем возбуждения и изменения магнитного потока становятся асимметричными (см. рис. 6.56.а и 6.56.6). В результате этого появляется выходное напряжение, пропорциональное производной разности магнитных потоков. Нх>0 насьпцение  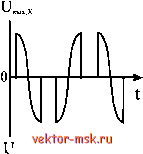 вых.У Рис. 6.56. Эпюры выходного напряжения феррозондового датчика: а - при Н^ > 0; б- при Н^> О Если внепшее магнитное поле П прикладывается под углом 0, то на измерительных обмотках X и Y появляются напряжения, равные соответственно: (6.8) (6.9) Следовательно, угол 0 можно определить по следующей формуле и установить курс перемещения объекта (рис. 6.54.а): где к - коэффициент преобразования, определяемый конструкцией датчика; выхх напряжение на выходе измерительной обмотки X; вых Y ~ напряжение на выходе измерительной обмотки У. Зарубежные фирмы вьшускают широкую номенклатуру миниатюрных магнитных датчиков для определения вектора магнитного поля, использующих феррозонды. На рис. 6.57 показан внешний вид и дана выходная характеристика датчика типа TMS-215, вьшускаемого фирмой TDK. На рис. 6.58 приведена упрощенная функциональная схема датчика. TMS-215 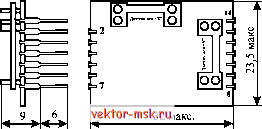
Рис. 6.57 Датчик типа TMS-215: а - внешний вид; б - выходная характеристика 180 270 Угол поворота Генератор импульсов -Unq>- Датчик оси X TMS-215 I I Амплитудный детектор Амплитудный детектор -(5) Выход X 4) Выход Y Общий Рж. 6.58. Упрощенная функциональная схема датчика типа TMS-215 Ведущим производителем феррозондовых датчиков является фирма Applied Physics System, которая вьшускает серию датчиков: APS544, APS520, APS520A, APS533, APS534, APS428C, APS450, APS460, APS470, НР3529 и др. Далее приводится краткая характеристика датчика типа APS544. Миниатюрный ориентационный датчик угла APS544 Представляет собой 3-координатный магнитометр, сопряженный с 3-координатным акселерометром. Прибор регистрирует магнитное поле, направленое по любой из трех осей (X, Y, Z). Прибор вьшолнен в виде отдельного модуля. В модуле используется миниатюрный феррозондовый датчик, схема усиления и обработки сигнала. Результаты измерений вьшодятся по специальному кабелю в цифровой форме. Для вьшода информации используется стандартный интерфейс RS-232. Прибор размещен в пластмассовом корпусе прямоугольной формы. Максимальные габариты -19,1X19,1X117 мм, масса - 50 п Внешний вид этого датчика показан нарис. 6.59. 025,4  APS544 APPLIED PHYSICS SYSTEMS Г~й 116,8 макс
Рис. 6.59. Внешний вид ориентационного датчика типа APS544 Ориентационный датчик APS544 предназначен для применения в системах ориентации и навигации различного назначения (в том числе буровых установок и бакенов); для измерения параметров магнитных полей, для аппаратуры слежения за миграцией животных и т.п. Основные параметры и внешний вид феррозондовых датчиков, предназначенных для определения вектора магнитного поля, приводятся в главе 24 тома 2. Дополнительные сведения см. [33, 34, 36, 38, 39, 40, 44, 46, 47, 48, 50, 52, 53, 55, 60, 61, 65, 66, 69, 71, 72]. |















