
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Промышленные интегральные схемы 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 [ 37 ] 38 39 40 41 42 43 44 45 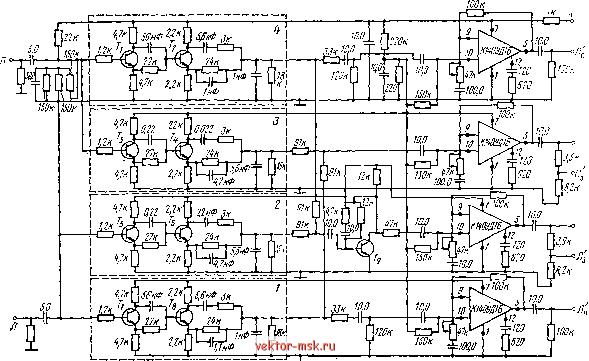 Рис. 8.11. Принципиальная схема SQ-декодера ветственно на 1$, Т4 и Гд, Те. Фильтры имеют полосу пропускания 20-20 000 Гц и затухание 10 дБ. Смещение сигналов происходит в соответствии со структурной схемой на рис. 8.106. Инвертирование сигнала в канале Лз осуществляется с помощью Тд. Сформированные сигналы поступают на буферные усилители, выполненные на ИС типа К140УД1Б. Эти усилители точно компенсируют потери сигнала, поэтому включение 5Q-дeкoдe-ра при переходе со стерео на квадро не приводит к изменению громкости. Имеются 5С?-декодеры в виде гибридных ИС, например, ИС фирмы Motorola МС1312Р и МС1313Р. Выполнение SQ-декоде-ров в виде ИС позволяет обеспечить высокую степень идентичности фазовых фильтров. 8.5. Электронные схемы управления двигателем ЭПУ Разработка электронных систем управления двигателем элек-тропроигрывающего устройства (ЭПУ) обусловлена стремлением достичь стабильности электромеханических параметров во времени. Впоследствии выяснилось, что использование сквозной отрицательной обратной связи, охватывающей в том числе диск, позволяет создать ЭПУ, превосходящие по основным параметрам ЭПУ с механическими узлами [66]. Большое распространение получили ЭПУ, в которых колебания генератора, усиленные до мощ1гостн 6-8 Вт, поступают на тихоходный синхронный конденсаторный двигатель. Двигатель связан с диском с помощью пассика. Переключение скорости осуществляется изменением элементов RC-nenn генератора. Кроме того, возможна подстройка скорости с помощью переменного резистора в пределах ±2%. Обычно в этих ЭПУ частоте вращения 45 об/мин соответствуют частота вращения двигателя 375 об/мин и частота генератора 50 Гц; для частоты вращения 33 1/3 об/мин соответствующие значения равны 278 об/мин и 37 Гц. По этому принципу выполнены ЭПУ отечественных электрофонов Электроника Б1-01 *и Феникс , в которых достигнута стабильность приводного механизма двигателя при изменении механической нагрузки и напряжения питания сети на ±10%, не превышающая 0,12%, а уровень помех от механических вибраций 60 дБ. Эти показатели получены при выполнении /?С-генератора на дискретных компонентах. Применение ОУ или ИС компараторов может' несколько повысить стабильность. Однако более значительное улучшение качественных показателей ЭПУ можно достичь, используя ИС в системах с глубокой отрицательной обратной связью. Структурная схема одного из таких ЭПУ приведена на рпс. 8.12. Здесь диск ] ЭПУ закреплен непосредственно на валу тихоходного двигателя постоянного тока 2. В диске размещены 90 пар полюсов 3 тахогенератора, с обмотки 4 которого снимается напряжение обратной связи. Это переменное напряжение усиливается в усилителе 5, ограничивается в ограничителе 6 и поступает на фильтр нижних частот 7, настроенный таким образом, что частота тахогенератора соответствует точке на скате частотной характеристики. После ФНЧ напряжение выпрямляется в выпрямителе 8 и поступает на усилитель 9 в качестве регулирующего сигнала. Выход усилителя постоянного тока 9 включен к Рис. 8.12. Структурная схема ЭПУ с электронным управлением синхронного двигателя: i-диск, 5 -двигатель, 3 - полюса магнитов, 4 -обмотка та.хогенератора, 5 - усилитель, 6 - ограничитель, 7-ФНЧ; 5 - выпрямитель, 10 - ключевая схема двигателю 2 в качестве источника питания. Изменение частоты вращения диска вызывает изменение частоты тахогенератора. Благодаря цепп обратной связи, напряжение на выходе усилителя изменяется таким образом, что скорость вращения диска принимает прежнее значение. Для переключения или плавного изменения частоты вращения диска достаточно изменить настройку ФНЧ 7. Требуемый пусковой момент двигателя обеспечивается тем, что усилитель в первый момент развивает большую мощность, затем напряжение тахогенератора, пройдя через ключевую схему 10, уменьшает выходную мощность усилителя до уровня, требуемого для обеспечения рабочего вращающего момента двигателя. В экспериментальном макете такого ЭПУ достигнуты коэффициент детонации 0,03% и уровень механических вибраций 60 дБ. Электронная схема управления двигателем, использующая датчики ЭДС Холла, приведена в [67]. Датчики ЭДС Холла расположены под диском двигателя. В диске размещены постоянные магниты таким образом, что мимо датчиков проходят разные полюса магнитов. На зажимах датчиков ЭДС Холла возникают потенциалы тогда, когда его пересекают силовые линии в горизонтальной плоскости, т. е. разнопо-лярные полюса располагаются по обе стороны от датчика. При любом положении диска один из транзисторов открыт и, следовательно, одна из обмоток участвует во враи-енип двигателя. Остальные три обмоткн являются датчиками цепп обратной связи. Основным фактором, определяющим стабильность вращения, является известная способность ОУ с обратной связью поддерживать потенциалы инвертирующего п неинвертпрующего входов примерно одинаковыми. По данным [67] колебание угловой скорости в описываемом ЭПУ составляет 0,037о- Примеры этого раздела показывают, что путем введения глубокой отрицательной обратной связи и использования электронных методов регулирования можно добиться высоких электрических показателей в электромеханических устройствах. |
|||||||||||















