
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 [ 74 ] 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 где п - коэффициент полноты использования располагаемого (максимально возможного, т.е. при нулевом положении сопл) 1, =-7-<1. фективность ракетного двигателя в первом приближении можно оценить выражением суммарного импульса тяги. Баллистическую эф. гОС гСОП * vn * V = -1 + а 1 + а уд уд На рис. 4.1 дана зависимость коэффициента баллистической эффективности от п для ЭУТТ с управлением проекцией тяги с достаточно хорошими располагаемыми энергомассовыми характеристиками (/ = 2500; а = 0,1). Для ЭУТТ с управлением величиной тяги баллистическая эффективность от коэффициента полноты использования располагаемого суммарного импульса тяги (он всегда равен единице) практически не зависит (рис. 4.1), эти ЭУТТ даже при сравнительно худшем энергомассовом совершенстве (/ = 2000; а = 0,4) имеют преимупдество во всем практически важном для задач управления диапазоне значений п. Кб 2000 1500 1000 500 О
0,75 Рис. 4.1. Зависимость баллистической эффективности от заданного коэффициента полноты использования располагаемого езмарного импульса тяги п: 1 - управление проекцией тяги; 2 - управление величиной тяги УПРАВЖНИЕСХЕВОЙПЮЕКЦИЕЙТЯГИ 227 С учетом того что непроизводительно расходуемое топливо к тому же является полезным грузом для нижних ступеней ракеты (на рис. 4.1 не отражено), рациональная область использования управления проекцией тяги смещается в сторону 0,8 < w < 1. Такое высокое значение п противоречит продекларированному в начале главы тезису о легкой возможности существенного увеличения глубины регулирования. Управление проекциями тяг скорее годится для маршевых РДТТ для управления направлением тяги (если еще будет доказано преимущество перед другими органами управления) или при незначительной адаптации к условиям полета, корректировке разбросов. Тем не менее при выборе схемы управляемой ЭУТТ на первонача1п ных стадиях ее разработки способ управления проекцией тяги, обладающий рядом достоинств, должен всесторонне рассматриваться и сопоставляться с другими способами. Для некоторых типов заданных циклограмм работы двигательную установку возможно составить из нескольких РДТТ, объединенных в блок, часть из которых (или все) имеют управление проекцией тяги. РДТТ имеют различные времена работы и запускаются в определенной последовательности. Это позволяет в несколько раз повысить значения п для каждого из РДТТ (т.е. раздельно для РДТТ больших и малых тяг) по сравнению с единым РДТТ, переходяпщм на пониженную тягу. Такое решение увеличивает баллистическую эффективность двигательной установки за счет уменьшения непроизводительного расхода топлива. Командное уменьшение Kq при работе (т.е. по сравнению с располагаемым значением) обоснованно в тех случаях, когда одноразовое уменьшение (вплоть до обнуления) тяги осуществляется с целью регулирования (в сторону уменьшения) дальности стрельбы (аналогично разовым устройствам отсечки тяги), так как максимальное значение требуемого коэффициента баллистической эффективности в этом случае будет равно его располагаемому значению. Во всех остальных случаях, когда уменьшение тяги производится с целью совершения маневра, требуются неоднократные переходы с большой тяги на малую и обратно, уменьшение необоснованно, так как максимальное значение требуемого заведомо меньше его располагаемого значения. 4.1. УПРАВЛЕНИЕ ОСЕВОЙ ПРОЕКЦИЕЙ ТЯГИ ПОСРЕДСТВОМ ВЕРНЬЕРНЫХ ДВИГАТЕЛЕЙ Наиболее логичным, простым и надежным способом управления осевой проекцией тяги при составлении двигательной установки из нескольких (например, четырех) двигателей является поворот по командам системы управления этих двигателей вокруг какой-либо оси, образующей с вектором тяги этого двигателя некоторый угол. Такие двигатели называются верньерными. Идея управления посредством поворота всего РДТТ принадлежит Кибальчичу (1881 г.). Практическое использование верньерных двигателей началось с БРСД РТ-1 (8К95). Впрочем, главным назначением этих, как и подавляющего большинства всех известных верньерных двигателей, является управление направлением тяги (в основном в качестве двигателей крена). Схемы верньерных двигателей представлены на рис. 4.2. 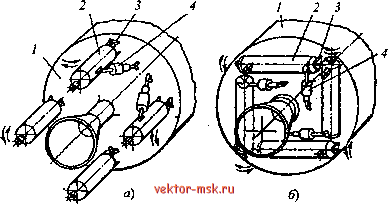 Рис. 4.2. Схема расположения управляющих двигателей на ракете: а - параллельно оси ракеты; б - перпендикулярно оси ракеты; 1 - корпус двигателя; 2 - поворотный двигатель; 3 - шарнирная опора; 4 - рулевая машинка |















