
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 [ 65 ] 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 гашении является сравнительно большой величиной (до 1 % суммарного импульса, создаваемого двигателем за все время работы). Большое значение шшульса последействия обусловлено истечением через сопло холодной, т.е. имеющей большую плотность, парогазовой смеси. Количество истекающей парогазовой смеси зависит от массы газа, находившегося в камере на момент гашения (определяется давлением и свободным объемом), и массы впрыскиваемой воды. Так как последняя преобладает, а ее значение неизменно, разбросы импульса последействия не превышают 15 %, что характерно для обьгтаых ЭУТТ. Таким образом, точность регулирования (с учетом поправки на хорошо прогнозируемое значение импульса последействия) при гашении находится на хорошем для РДТТ уровне (-0,15%). Имеется возможность дальнейшего повышения точности регулирования. Это достигается за счет того, что на дифференциальном поршне размещаются сферические шторки, кинематически связанные с корпусом УГТ (рис. 3.30). 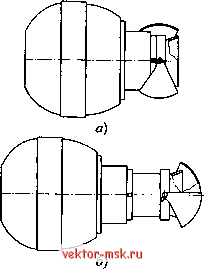 Рис 3.30. Сферические шторки, связанные с корпусом УГГ: а - исходное положение; б - при гашении 3.4. ЭНЕРГЕТИЧЕСКИЕ УСТАНОВКИ МНОГОКРАТНОГО ВКЛЮЧЕНИЯ В ПОЛЕТЕ Основной областью применения двигателей многократного включения (ДМВ) являются разгонные блоки ракет-носителей и системы маневрирования космических летательных аппаратов (КЛА). Например, при переходе КЛА с одной орбиты на другую требуется многократное включение ракетного двигателя. По функциональному назначению ближайшим аналогом ДМВ являются двигатели глубокого регулирования (ДГР) с глубиной регулирования расходно-тяговых характеристик 10 ... 12. ДГР способны некоторое время (десятки секунд) работать на режиме экономичной (т.е. пониженной) тяги. В отличие от ДГР у ДМВ пауза между его включениями по времени ничем не ограничена (в межпланетных перелетах может составлять несколько лет), ДМВ лишен таких прис)шщх ДГР недостатков, как: низкая энергетика большинства схем ДГР, связанная с тем, что регулирующие элементы (клапаны, тепловой нож и т.д.) не могут работать в условиях высоких температур; ограничение сверху суммарного времени работы двигателя (до полного выгорания заряда); ограничение максимально реализуемой глубины регулирования; большое время переходных процессов, увеличивающееся при возрастании реализованной глубины регулирования и свободного объема КС; При начале движения дифференциального поршня сферические шторки автоматически захлопываются. Подчеркнем, что пггорки вводятся в поток низкотемпературной парогазовой смеси, имеющий малый скоростной напор, что обусловливает малую массу шторок. Варьируя геометрию и время захлапывания сферических шторок, можно добиться высокой точности регулирования значения суммарного импульса. забросы тяги при переходных процессах; необходимость разработки для ДГР топливных составов с рядом специфических свойств; наличие сложной системы управления. Массовые характеристики ДМВ и ДГР находятся на одном уровне. В отличие от ДГР в ДМВ могут применяться те же высокоэнергетические топливные составы, которые используются в неуправляемых маршевых РДТТ. Удельный импульс ДМВ сопоставим с маршевыми РДТТ (ввиду традиционно малых габаритов сопловых блоков ДМВ увеличивается роль двухфазных потерь, несколько понижающих значение удельного импульса). Преимущества ДМВ перед ДГР по удельному импульсу могут составлять 400... 600м/с. Преимущество ДМВ перед ДГР по баллистической эффективности делает схему ДМВ наиболее прогрессивной при соответствующей отработке надежности процессов гашения и запуска двигателя. В зависимости от задач, ставящихся перед ДУ КЛА, ДМВ можно рассматривать как элемент объединенной многофункциона1п>ной энергоустановки глубокого регулирования, состоящей из маршевого ДМВ и системы вспомогательных двигателей малой тяги. Вспомогательные двигатели могут быть неуправляемыми или иметь надежные устройства неглубокого регулирования (например, ВУС, рассчитанные на малые углы отклонения, т.е. имеюпще малые потери на холостых режимах). ВУС может быть снабжен и маршевый ДМВ. Пример объединенной многофункциональной энергоустановки, характеризующейся большим временем работы (десятки минут) и неограниченно длинными паузами между включениями [23], пред-сгавлен на рис. 3.31. Энергоустановка состоит из разгонного ДМВ 1 большой тяги и независимой управляющей газобаллонной системы малой тяги. Последняя имеет ресивер 5, батарею низкотемпературных газогенераторов 2, клапаны-микросопла 5, датчик давления 5. Бак с водой 7 является принадлежностью ДМВ 1 и газосвязан с ресивером 3 через редуктор б. В исходном состоянии все полости энергоустановки являются ненагруженными. При включении энергоустановки |















