
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 [ 6 ] 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 гшпульс последействия (суммарный импульс тяги, набираемый с момента подачи команды на прекращение действия тяги) и разбросы импульса последействия (иногда система управления может подавать команду на отсечку тяги с упреждением на известную минимальную величину импульса последействия, при этом погрешность регулирования становится равной разбросам импульса последействия); динамические нагрузки, возникающие при срабатывании устройств изменения тяги; величина забросов тяги при переходных процессах АРп (см. рис. 1.4). Забросы являются следствием стремления сократить время переходных процессов при изменении площади критического сечения и обусловлены обратной зависимостью между величиной площади критического сечения и уровнем давления в камере сгорания при использовании топлив с О < v < 1. Забросы проявляются сильнее по мере увеличения свободного объема камеры. Наличие забросов ограничивает реализуемое время переходных процессов; воспроизводимость (прогнозируемосгь) результатов управляющих команд, подаваемых при различных условиях работы ЭУТТ (при различных уровнях тяги и требуемой глубине перехода, различном свободном объеме камеры, различной предыстории процесса функционирования ЭУТТ и т.д.); суммарное время работы, большая величина которого (сотни секунд) может не соответствовать скоростям горения существующих топлив, вызывая особенности конструктивной схемы и принципов ее работы; точность стабгишзации выходного параметра (тяги или расхода) на заданном режиме работы; надеокмость, характеризующая отработанную конструкцию ЭУТТ; эксплуатационные характеристики, гарантийные сроки хранения и т.д. Следует отметить, что для различных типов управляемых ЭУТТ важность (приоритетность) вышеуказанных характеристик различна. Так, для УЭУТТ, эксплуатирующихся на Земле, энергомассовые характеристики имеют второстепенное значение. Эффективность выполнения конкретной управляемой ЭУТТ возлагаемых на нее функций может оцениваться только при комплексном учете всей совокупности перечисленных характеристик и в увязке с теми условиями, в которых получены при отработке заявляемые разработчиком характеристики. При расчете времени переходного процесса необходимо учитывать зависимость его от свободного объема камеры сгорания, т.е. то, что по мере работы двигателя tn.u существенно увеличивается. С учетом времени переходного процесса необходимо также обращать внимание на циклограмму работы рассматриваемой ЭУТТ. Например, переход с максимального Рщах значения параметра на минимальное Р^ш при ступенчато-монотонной циклограмме (рис. 1.5) работы реализовать значительно проще, чем при резком изменении этого параметра (рис. 1.6). При ступенчатом (постепенном) переходе уменьшается величина забросов, снижается проявление таких негативных явлений, как опасность погасания заряда при резком сбросе давления, ударно-динамические нагрузки на двигатель и т.п., повышается точность стабилизации параметров на всех режимах. Поэтому разницу между крайними режимами (см. рис. 1.5) правильнее называть степенью изменения параметра Р. Реализуемая глубина регулиро- 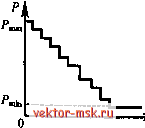 Рис, 1.5. С1упенчато-монотонная циклограмма изменения тяги Рис. 1.6. Двухуровневая циклограмма изменения тяги вания параметра Р, как правило, является меньшей величиной, чем диапазон изменения этого параметра. Стремление максимально увеличить реализуемую глубину регулирования может: снизить воспроизводимость результатов управляющих команд; вызвать необходимость перехода на менее энергетичные топлива; увеличить массу конструкщ1и. Перед более детальным рассмотрением управляемых ЭУТТ проведем краткий обзор принципиальных способов непрерывного управления модулем тяги фасхода топлива). 1.2. ПРИНЦИПИАЛЬНЫЕ СПОСОБЫ УПРАВЛЕНИЯ МОДУЛЕМ ТЯГИ Оценить возможные пути оперативного изменения модуля тяги можно при рассмотрении основных уравнений тяговых харак-терисгик РДТТ: P = m/y+F/? , (1.1) m = aApF, (1.2) P=nS,ul (1.4) Iy,=f(hR,TJ,l (1.5) где Fa, - площадь выходного сечения сопла и степень его расширения; - давление внешней среды; оЛ =f{k,R, 7) - расходный коэффициент; k,R,T- показатель адиабаты, газовая постоянная и температура продуктов сгорания в камере двигателя; S, и -площадь поверхности заряда и скорость горения топлива. Анализ уравнений (1.1) - (1.5) показывает, что пустотная добавка (Fj?aX зависящая от давления внешней среды р^, на порядок меньше основной составляющей (/w/уд) и реально не может быть объектом регулирования тяги. |
|||||||||||||||||















