
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 [ 53 ] 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 Глава 3 ЭУТТ С ДИСКРЕТНО ИЗМЕНЯЕМЫМИ ЭНЕРГЕТИЧЕСКИМИ ПАРАМЕТРАМИ Сложности непрерывного управления, рассмотренные в предыдущих главах, приводят к необходимости поиска более простых схем дискретного изменения энергетических параметров, которого во многих случаях достаточно для управления объектами ракетно-космической техники. В настоящей главе рассмотрены способы дискретного (чаще всего двухуровневого) изменения параметров ЭУ по команде от системы управления. Чаще всего системы дискретного изменения параметров ЭУ применяются для регламентащ1и величины суммарного импульса тяги. Если регламентащм значения суммарного импульса тяги имеет целью изменение дальности стрельбы, то необходимо отметить, что достижение этой цели возможно и при неизменном значении суммарного импульса, т.е. траекторными способами. Баллистическая эффективность ракеты в этом случае повышается за счет отсутствия дополнительных устройств отсечки тяги. Изменение энергетических параметров ЭУ, регламентацию суммарного импульса тяги, изменение дальности стрельбы можно реализовать следующими способами: 1. Изменением дальности стрельбы посредством изменения наклона траектории на активном участке траектории (АУТ) и соответственного изменения угла тангажа в точке конца АУТ. 2. Изменением дальности стрельбы посредством выбора момента запуска разгонного неуправляемого (но управляющего!) двигателя, установленного на блоке полезной нагрузки. Разгонный двигатель может запускаться в момент окончания АУТ, в верхней точке траектории, на нисходящем участке, т.е. после некоторой управляемой паузы, дальность стрельбы является функцией этой паузы. 3. Изменением (в сторону уменьшения) суммарного импульса, сообщенного полезной нагрузке неуправляемым двигателем, посредством отделения полезной нагрузки от работающего двигателя. Примером этого способа является тянущая схема. 4. Реверсом тяги посредством вскрытия сопл противотяги, на-хфавленных в сторону, противоположную основному соплу, и создающих на момент вскрытия тягу, превышающую тягу основного сопла [28]. Одновременно с командой на реверс тяги подается команда на отделение полезной нагрузки. Отметим, что при вскрытии сопл противотяги двигатель переходит на режим работы с уменьшенным внутрикамерным давлением и работает на этом режиме до полного выгорания топлива. С целью повышения точности набора суммарного импульса вскрьггие сопл противотяги может проводиться ступенчато: часть сопл вскрывается по предварительной команде, и двигатель переходит на режим малой тяги. На этом режиме подается главная команда на вскрытие оставшихся сопл противотяги. 5. Гашением заряда посредством вскрытия окон. От предыдущего способа отличается существенно большей площадью вскрываемых окон, обеспечивающей градиент спада давления в камере, достаточный для прекращения гфоцесса горения топлива. 6. Посредством сбрасываемого узла дросселирования тяги. 7. Гашением двигателя посредством впрыска хладагента в камеру сгорания. Развитием ЭУ с отсечкой тяги гашением являются двигатели многократного включения (ДМВ). Первые два из перечисленных способов являются траектор-ными (т.е. реализуются системой управления ракеты) и не влияют на конструкцию двигателей. В настоящей книге они не рассматриваются. Третий способ также является траекторным. Однако он, как правило, приводит к конструктивно-компоновочным особенностям используемого двигателя. В гл. 3 рассмотрены пять последних способов, реализуемых посредством специальных узлов конструкции двигателя. 3.1. ЭУ с МЕХАНИЧЕСКИМИ УЗЛАМИ ПРЕКРАЩЕНИЯ ДЕЙСТВИЯ ТЯГИ ИЛИ ЕЕ РЕВЕРСА В настоящем разделе представлены 3,4 и 5-й способы. Иллюстращюй 3-го и 4-го способов изменения энергетических параметров ЭУ и изменения дальности стрельбы являются ракеты, разрабатывавшиеся в конце 50-х годов в СКБ-172 (ныне ОАО НПО Искра ), и РДТТ 3-й ступени МБР РС-12 (SS-13), разработанной в НПО Искра в 1968 году [28]. Ракета ЗМ2 Ладога (рис. 3.1) выполнена по тянущей схеме (3-й способ). Ракета ЗМ2-5 (рис. 3.2), ракета М202 (рис. 3.3), 3-я ступень МБР РС-12 (рис. 3.4) иллюстрируют 4-й способ. При этом на двигателях ракеты ЗМ2-5 и 3-й ступени МБР РС-12 сопла противотяги выполнены на переднем днище, а на двигателе ракеты М202 - в районе заднего днища. 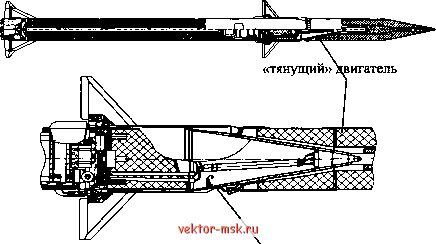 сопла тянущего двигателя Рис. 3.1. Ракега ЗМ2 Ладога |















