
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 [ 4 ] 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 3. Управления полетом ракеты по каналу крена. 4. Обеспечения маневрирования КЛА и его перевод с одной орбиты на другую. 5. Коррекции траектории КЛА. 6. Ориентации и стабилизации КЛА [27, 52]. 7. Оперативного управления тягой авиационных и зенитных ракет, а также объектов средств противоракетной обороны [4,26]. 8. Изменения режимов движения подводных аппаратов (торпед) [52]. 9. Управления тягой двигателя активно-реактивных снарядов [26]. 10. Наддува баков ЖРД [10]. И. Обеспечения повторно-периодического режима плазмоге-нератора МГД-установки [58]. 12. Обеспечения минометного старта различных изделий и ракет. 13. Экстренного запуска транспортных средств (дизелей, газотурбинных двигателей). В связи с этими функциями управляемых ЭУТТ выдвигаются определенные требования к циклограмме их работы. В ракетных системах, связанных с уничтожением маневрирующих целей, энергоустановки должны обеспечивать два режима поиска и атаки (рис. 1.3, а). В системах, движущихся по баллистическим траекториям, например в тактических ракетах, активно-реактивных снарядах, энергоустановки должны обеспечить коррекцию траектории по дальности полета и курсу. Необходимая циклограмма изменения тяги ДУ показана на рис. 1.3, б, В ракетных системах с разводящимися боевыми блоками ЭУТТ должна обеспечить сложную циклограмму работы, иметь возможность регулирования тяга по трем осям и обладать высокими динамическими характеристиками. Вариант изменения суммарного расхода по времени работы такой ЭУТТ представлен на рис. 1.3, е.  О t О j-4r4j 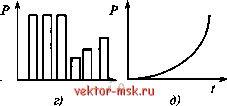 t о Рис 13. Типичные циклограммы изменения тяги и расхода топлива В ракетно-космических системах для сближения объектов и перевода их с одной орбиты на другую ЭУТТ должны обеспечивать не только регулирование основных характеристик, но и многократное включение-выключение с большими периодами молчания . Циклограмма изменения расхода такой ЭУТТ представлена на рис. 1.3, г. В системах старта ракет и запуска транспортных двигателей (в экстремальных условиях) требуется существенно прогрессивная расходная характеристика. Циклограмма изменения расхода продуктов сгорания РЭУ стартовой системы приведена на рис. 1.3, д. Представленные типы циклограмм работы могут быть реализованы в ходе: оперативного управления. Алгоритм работы заранее не известен, скорость глубоких переходов с режима на режим должна превышать скорость быстроменяющихся условий полета; управления при квазистационарном режиме работы. В общих чертах известна потребная форма щ1Клограммы, в процессе полета в соответствии с ювестной щ1клограммой программно изменяется уровень тяги; предварительного программирования точно известной циклограммы, в отличие от ЭУТТ с жестко программируемыми параметрами, т.е. имеющими разгораемые вкладыши, заданную дегрессивность поверхности горения и т.д. В данном случае система управления посредством специальных исполнительных элементов активно управляет внутрикамерными процессами. Необходимая (требуемая) циклограмма обуславливает степень сложности УЭУТТ, а также определяет степень приоритетности различных технических характеристик УЭУТТ. Заданный характер циклограммы работы ЭУТТ и возможность вьшолнения требуемых х^актеристик можно обеспечить, рационально выбрав принцип действия ЭУТТ и тип применяемого топлива. Многообразие (по принципам действия) типов управляемых (по величине тяги или расхода) ЭУТТ условно можно представить в виде следующих групп (см. рис. 1.1): ЭУТТ с непрерывно управляемыми энергетическими параметрами (см. рис. 1.2). Исследования ЭУТГ данной группы наиболее разнообразны и многочисленны, что обусловлено универсальностью и эффективностью непрерывного управления; ЭУТТ с управлением осевой проекцией тяги. По вьшол-няемым функциям аналогичны первой группе, однако управление такими энергоустановками не требует вмешательства во внутри-камерные процессы. Широкому распространению этих ЭУТТ мешает резкое снижение их баллистической эффективности при увеличении глубины регулирования и времени работы на режимах пониженной тяги. Более подробно ЭУТТ данной группы рассмотрены в гл. 4; ЭУТТ с дискретно изменяемыми энергетическими параметрами. Они имеют относительно простую конструкцию, простые алгоритмы управления и хорошую воспроизводимость результатов управляюпщх команд. При творческом подходе к формированию необходимой циклограммы работы в больпшнстве случаев ЭУТТ с дискретно изменяемыми энергетическими параметрами могут заменять более сложные ЭУТТ с непрерывным управлением. Баллистическая эффективность ЭУТТ с дискретно |















