
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 [ 14 ] 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 Снижение точности отработки заданных системой управления импульсов тяги, вызванное переходными процессами на текущем цикле работы, особенно критично для головной части (ГЧ) ЭУТТ. Поэтому в ТЗ на разработку ЭУТТ одним из основных критериев является регламентация допустимого времени перехода с одного режима на другой tn. Как правило, речь идет об ограничении значения tn<l с. Однако и по расчетам, выполненным по разным методикам (как упрощенным, так и с учетом закона движения исполнительного элемента с применением нелинейной системы дифференциальных уравнений), и по многочисленным экспериментальным данным, t к концу функционирования глубокорегулируемой ЭУТТ достигает нескольких секунд. Необходимость решения проблемы уменьшения времени переходных процессов стала очевидной уже при проведении самых первых опытов в начале 60-х годов, и тогда стали формироваться разные подходы к решению этой проблемы [29]. Из приведенных выше формул видно, что на длительность и качество переходных процессов влияют следующие факторы: свободный объем камеры сгорания; закон скорости горения топлива; конструктивно-компоновочная схема двигателя; глубина регулирования; закон изменения площади критического сечения F = /(r). На сегодня данный вопрос достаточно полно исследован и разработан. Известно несколько принципиальных методов улучшения качества переходных процессов: изменение конструктивной схемы ЭУТТ; использование топлива со специфическим законом горения; изменение алгоритмов управления работы регулятора. Наиболее эффективный конструктивный способ - многокамерное исполнение ЭУТТ, в которой отдельные газогенераторы срабатьша-ют последовательно, а отработанные отсекаются от общего внутреннего объема. Таким образом, свободный максимальный объем для этой схемы и соответственно переходное время сокращаются кратно числу генераторов. При этом решается только одна сторона проблемы улучшения качества переходных процессов: сокращается длительность, а степень перерегулированга остается прежней. Несмотря на некоторые плюсы этого метода, он не нашел широкого применения (за исключением необходимости создания ЭУТТ с очень большой продолжительностью работы - 600 ... 2000 с и более). Такое решение, как показали многочисленные исследования и конструкторские проработки, приводит в сравнении с однокамерным вариантом к некоторому (на 15 ... 30 %) увеличению массы конструкции, имеющему одинаковые величины и циклограммы хяги: из-за появления дополнительных газоводов, коллектора, пус-коотсечных клапанов, датчиков (сигнализаторов), кабелей, дополнительной внешней теплоизоляции газогенераторов корпусов (ГГ). Существенного улучшения качества переходных процессов разработчики ожидали от использования в ЭУТТ ресивера и дополнительного промежуточного регулятора. Применительно к подобной схеме переходные процессы можно рассчитать по той же системе уравнений (за вычетом зависимости для Рщ,) с использованием следующих дополнительных уравнений: 3 [ dt c dt ~dr~~dt dt dmc2. (2.8) 5(*,) = *, + 1 при pp < p, k, - 1 (2.9) при Pp > p 4*1+1 kx-i где Шеи с2 - масса газоприхода и газорасхода из ресивера соответственно; тс2у 3 - масса газов, вытекшая из ресивера и находящаяся в ресивере; бр - потери тепла в регуляторе расхода и ресивере; Fp - площадь сеченга регулятора расхода; рр - давление в ресивере; Wp- объем ресивера. Характер изменения тяги в перскодщло периоды для схемы с ресивером показан на рис. 2.7, б. Расчеты для первой и второй схем проведены при максимальном свободном объеме ГТ (при этом подразумевалось использование одной камфы). На графиках виден не только факт возмущения тяги, но и характер заброса и провала тяги. Численное моделирование процессов при различных вариантах срабатьюания клапанов позволило т 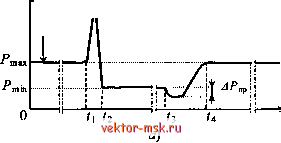 О
Рис. 2.7. Изменение силы тяги при переключении с на Р^ и наоборот: а - для схемы без ресивера; б - для схемы с ресивером |
||||||||||||||||||















