
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 [ 119 ] 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153  Рис 8.28. Расчетные схемы для определения контуров регуляторов (С - угловая точка): а - профиль определяется иглой; б - профиль определяется раструбом наоборот, увеличение. Более того, как следует из вида дифференциального уравнения и приведенных схем, положение критического сечения считалось неизменным относительно точки С (система координат жестко связана с точкой С), что не может соответствовать фактическому состоянию. В связи с этим проведем независимую аналитическую оценку возможности линейного изменения тяги Р при пропорциональном управляющему сигналу перемещении исполнительного элемента для регулятора игольчатого типа с расположением ИЭ со стороны дозвуковой части сопла (рис. 8.29) путем соответствующего выбора его профиля. Ввиду чрезвычайной сложности постановки и решения задачи в полном объеме (при совокупном учете геометрических, массовых, технологических, газодинамических, тепловых, силовых, масштабных факторов) методологически целесообразно отыскать, для начала, базовое решение в геометрической постановке. Для такого подхода есть несколько обоснований. Во-первых, невозможно проводить анализ по газодинамическим, силовым и подобным факторам, не имея в качестве исходных данных схемно-конструктивного решения. Во-вторых, анализ имеющихся экспериментальных данных разных авторов по определенипо коэффициента расхода (коэффициента сужения) ц, характеризующего 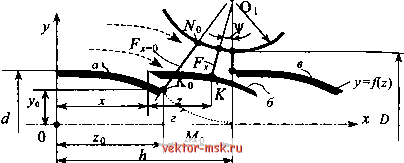 Рис. 8.29. Расчетная схема ИЭ регулятора: а - исходное положение {х = О, Pmhdl б - промежуточное положение иглы; в - конечное положение: x = h;P = Рщах; г - геометрическое место точки Ко для = 1 при варьировании tg Oq эффективное проходное сечение регулятора, показал, что для осе-симметричных потоков (в отличие от неосесимметричных) при конкретных схемах регуляторов он остается практически постоянным в большом диапазоне изменения давления и размеров. Изменение ц становится заметньп лишь при узких кольцевых зазорах шириной несколько десятых долей миллиметра. Следовательно, принимаем допущения, что элементы конструкции, образующие критическое сечение, в процессе работы не деформируются, не искажают свой исходный профиль и коэффициент расхода для всего хода штока не изменяется и т.д. Считаем заданными или предварительно рассчитанными следующие параметры: Руд ... Рм -диапазон регулирования тяги; pmin - минимальное рабочее давление в КС; закон скорости горения и v; А - полный рабочий ход ИЭ; Кр - коэффициент тяги (и/или расходный комплекс рА) для режима управления Pmin. Это позволяет определить для РДУ с односопловой конструкцией минимальный диаметр горловины D и мак- симальный диаметр ИЭ d, используя формулу Р = (РУ . Задаемся также радиусом скругления горловины R. Используя эти исходные данные, попытаемся найти продольный профиль ИЭ, т.е. вдоль оси сопла dx ) та, отсчитываемая от продольной оси регулятора; z - осевая координата, жестко связанная с ИЭ. Отсчет координаты z производится от максимального сечения ИЭ (при = 0,5 rf) в направлении рабочего участка профиля 0<z<A (т.е. в направлении течения газа); X - осевая координата, характеризующая перемещение ИЭ относительно неподвижного положения горловины, при этом 0<д:<А. Для общности решения, как и в предыдущем анализе, перейдем к безразмерным параметрам: Р,=1+х(Р-1); х = ; d=; h=; y = Z. f = -- F D D Fmin где Fjnin - площадь критического сечения сопла на минимальном режиме тяги. Кроме того, обозначим z = - = ---, где Mq - размер, ука- Zq A-Mq занный на рис. 8.29. Пренебрегая изменением Кр и [лА при пере- мощении ИЭ и используя уравнение Р={ру-, можно получить обратную зависимость от Р^: 1 + х{Р-1) v . (8.7) Рассмотрим поведение этой фунидаи на отрезке О < дс < 1 при О < V < 1 с использованием производной: = (P-l)[l+x(P-l)] v. dx v функцию образующей >z), обеспечивающей при перемещении ИЭ fdPA = const, где у - радиальная координа- |















