
ecosnos.ru

|
ecosnos.ru |
|
|
Главная Управляемые энергетические установки 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 [ 113 ] 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 1-V -;- При S = const, постоянстве расходного комплекса \iA и пренебрежении падением полного давления в полости регулятора (т| S 1) глубина регулирования по тяге или изменение тяги относительно площади своего минимального значения в безразмерном виде P= (F)(F)v-i. (8.1) няющихся В ЭУТТ (V Ф 0), наоборот, с увеличением площади сечения расход и тяга падают, причем нелинейно. Поэтому перечис-лейные особенности работы регуляторов и требования, предъявляемые к ним, не позволяют воспользоваться накопленным в пневматике и гидравлике богатым опытом разработки различных регулирующих устройств. Основное внимание специалисты, занимавшиеся проблемами РР для ЭУТТ, уделяли экспериментальному исследованию вопросов теплообмена, расчетным и экспериментальным методам определения параметров газовой динамики проточного тракта, расчету коэффициентов расхода, расходных характеристик для частных случаев с конкретными размерами, результатам отработки клапанов вдува в закритическую часть сопла для управления вектора тяги сопл крупногабаритных РДТТ. Меньше внимания было уделено конструированию и выбору схемных решений регуляторов, а также устройств, родственных по выполняемым функциям РР-перераспределителям. Независимо от используемой схемы регулирования тяги (или расхода), особенностей конструкции регулятора, используемого типа привода и т.д. требуемое изменение тяги достигается изменением площади критического (минимального) сечения сопла F, Между тягой Рх и площадью критического сечения сопла Р^ для эмпирического степенного закона скорости горения существует зависимость, вытекающая из преобразования формулы Бори: При Принятии допущения о второстепенном влиянии зависимости коэффициента тяги Кр от степени распшрения сопла из-за изменения F, т.е. полагая, что функция Kp{F)\, зависимость тяги от площади критического сечения сопла можно представить с достаточной для анализа точностью виде (этот вид используется наиболее часто) (8.2) (На самом деле расчеты с учетом изменения коэффициента тяги при степени расширения сопла на минимальном режиме 20 ... 50 показывают увеличение глубины регулирования на маршевом ре- жиме на 2 ... 5 %.) Поскольку-Ф\ ни при каких v, то зависи- мость P{F) является существенно нелинейной. Для наглядности данная зависимость показана на рис. 8.15. Классификация регуляторов расхода по методу изменения критического сечения была представлена в гл. 2. Рассмотрим наиболее характерные требования, которые необходимо выполнять при разработке конструкции регулятора. V =0,9 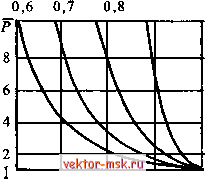 0,2 0,4 0,6 0,8 F Рис 8.15. Зависимость P(F) для различных v Требованш, предъявляемые к конструкциям регуляторов расхода. Создавая регулятор расхода как элемент конструкции ЭУТТ [39, 57], разработчик руководствуется как требованиями общего порядка, так и требованиями конкретного технического задания со своей спецификой. В свою очередь, сами технические данные, определяющие требуемые параметры регулятора, должны быть четко выявлены и тщательно подготовлены. Ниже изложены в общем виде систематизированные требования к регуляторам, при соблюдении которых повышается работоспособность и качество работы и которыми разработчик должен руководствоваться. К исходным требованиям, указываемым в ТЗ, относятся: обеспечение работоспособности, т.е. сохранение в течение всего времени работы исходных функций (регулирования расхода), а также недопущение прогара, заклинивания подвижных элементов, зашлаковывания проходного сечения, сохранение герметичности по стыкам и подвижным поверхностям и т.д.; обеспечение минимальных массовых и габаритных характеристик (компактности); обеспечение точности регулирования; сохранение как при многократном срабатывании, так и при непрерывной работе исходных параметрических характеристик (например, при фиксированном положении ИЭ относительно неподвижной горловины расход, тяга или давление должны быть постоянными от опыта к опыту). Соблюдение последнего требования будет зависеть, в частности, от жесткости кинематической цепи, просадки исполнительного элемента при изменении нагрузки на привод, отсутствия люфтов в кинематической цепи, гистерезиса и мертвой зоны в самом приводе, деформационных свойств сопрягаемых конструкций и т.д. К специфическим требованиям следует отнести в частности: обеспечение равенства порога чувствительности изменения выходного параметра от перемещения ИЭ; достижение линейности изменения расхода от перемещения ИЭ; обеспечение заданного быстродействия при ограниченной мощности привода либо, наоборот, при заданной мощности привода достижение максимального быстродействия; минимизацию потерь удельного импульса тяги как за счет исключения непроизводительных потерь потока, |















